Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Принцип дельта-модуляции в ЦСП
Как отмечалось выше, при дельта-модуляции (ДМ), представляющей собой разновидность разностных систем с предсказанием, разностный сигнал – двухуровневый и в линию передается информация лишь о знаке приращения разности. Существует много разновидностей ДМ, отличающихся видом предсказателя, характером предыскажений входного сигнал, способом формирования информационной импульсной последовательности и др. Каждая из разновидностей обладает определенными достоинствами, которые легче всего проследить, если сравнивать ее с наиболее простым вариантом ДМ, так называемой классической, или линейной ДМ.
Структурная схема такого устройства приведена на рисунке 35.
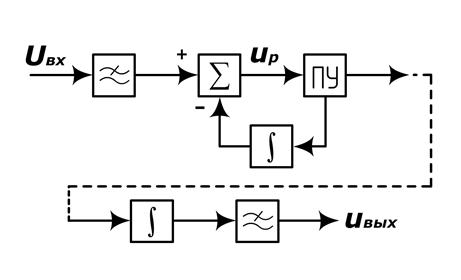
Рисунок 35 – Структурная схема канала с дельта-модуляцией
По сравнению со структурной схемой канала цифровой разностной системы (см. рисунок 34) предсказатель в схеме классической ДМ представляет собой интегратор, а функции квантования и кодирования выполняет пороговое устройство ПУ, вырабатывающее импульсы разной полярности (символы «1» и «0») в зависимости от знака разности uр. Приемная часть состоит из интегратора и ФНЧ. Все операции осуществляются в тактовые моменты, задаваемые генератором тактовой частоты (на схеме не показан).
В качестве предсказателя используется "идеальный интегратор", т.е. устройство с импульсной реакцией ступенчатой формы. Если на вход идеального интегратора воздействует бесконечно короткий импульс (рисунок 36,а),
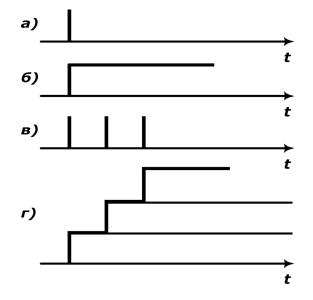
Рисунок 36 – Сигналы в цепи предсказания дельта-модулятора:
а -  -импульс; б – отклик идеального интегратора на -импульс; в – последовательность импульсов; г – отклик идеального интегратора на последовательность -импульсов
-импульс; б – отклик идеального интегратора на -импульс; в – последовательность импульсов; г – отклик идеального интегратора на последовательность -импульсов
то на его выходе появится и будет сохраняться бесконечно долго постоянное напряжение (рисунок 36,б). Поэтому говорят, что идеальный интегратор обладает бесконечной памятью. Если на вход интегратора воздействует несколько импульсов (рисунок 36,в), отклики на каждый из них суммируются и выходное напряжение имеет вид, показанный на рисунок 36,г. Огибающая выходного напряжения представляет собой ступенчатую функцию, а его значение в каждый момент определяется суммой откликов на импульсы, воздействовавшие во все предшествовавшие моменты времени. Процедуру кодирования при классической (линейной) ДМ поясняет рисунок 37.
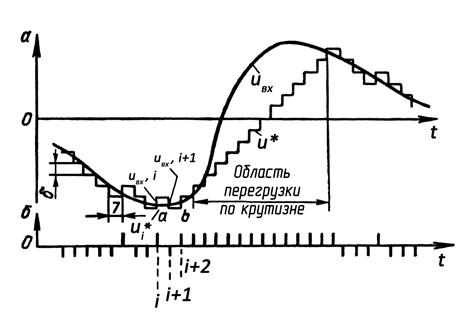
Рисунок 37 – Принцип дельта-модуляции
Копия сигнала формируется идеальным интегратором и имеет вид ступенчатой функции. Это предсказанное значение сигнала вычитается из его действительного значения и знак разности подвергается регулярной дискретизации. Если этот знак положителен, на выходе дельта-модулятора формируется положительный импульс. При отрицательном знаке разности в тактовый момент на выходе дельта-модулятора формируется отрицательный импульс. Пусть, например, предсказанное значение сигнала u*в i-й момент (точка ана рисунке 37) оказалось меньше входного сигнала в этот момент. Тогда на выходе дельта-модулятора появится положительный импульс, предсказанное значение в (i + 1) -ймомент увеличится на одну ступеньку и станет равным u* + (точка б на рисунке 37). Поскольку это значение оказалось больше, чем значение входного сигнала, разность u-ui + 1*окажется отрицательной. Соответственно импульс на выходе кодера также будет отрицательным и копия уменьшится на один шаг.
Выходной сигнал дельта-кодера, представляющий собой последовательность положительных и отрицательных импульсов (единиц и нулей), называется дельта – кодом (рисунок 37,б) Эта последовательность непосредственно передается по линии.
Из этого следует что при ДМ тактовая частота сигнала в линии fтсовпадает с частотой дискретизации сигнала Fд при кодировании.
В схеме дельта-модулятора интегратор включен в цепь отрицательной обратной связи (ООС), поэтому погрешности интегрирования, возникающие в процессе работы ДМ, частично компенсируются. В демодуляторе отсутствует цепь ООС, вследствие этого погрешности работы его интегратора приводят к ухудшению качества передачи.
Вид импульсной последовательности на выходе ДМ зависит от скорости изменения сигнала. Наглядное представление об этом можно получить из рассмотрения рисунка 38, на котором показаны копии сигнала (строчки 1) и дельта-код (строчки 2) при кодировании видеоимпульсов трапецеидальной формы с разной крутизной нарастания фронтов.
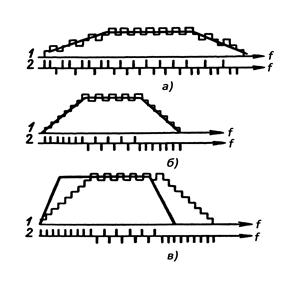
Рисунок 38 – Дельта-модуляция при разной крутизне входного сигнала
В общем случае при кодировании фронта входная последовательность содержит положительные и отрицательные импульсы, причем при кодировании нарастающего фронта преобладают положительные импульсы, а спадающего – отрицательные. Передаче постоянного уровня соответствует последовательность, состоящая из импульсов чередующейся полярности. Такая же знакочередующаяся последовательность импульсов передается при ДМ и в случае отсутствия сигнала на выходе.
С увеличением крутизны фронтов при их кодировании в импульсной последовательности возрастает число импульсов одного знака и при некотором предельном значении крутизны фронта sпред = /T = Fддельта-код содержит только положительные (при нарастании) или отрицательные (при спадании) импульсы (рисунок 38,б). Дальнейшее увеличение крутизны (рисунок 38,в) приводит к тому, что максимальная скорость нарастания копии оказывается меньше крутизны сигнала, в результате чего возникают искажения перегрузки крутизны, что иллюстрирует рисунок 37. Во избежание появления этих искажений максимальная крутизна входного сигнала не должна превышать значения
sпред = Fд.
Эта зависимость носит название перегрузочной характеристики.
Использование в схеме ДМ интегратора, обладающего бесконечной памятью, приводит к накоплению ошибок, возникающих из-за действия помех. Сущность этого явления поясняет рисунок 40, где показаны входной сигнал
ивх, его копия u*(рисунок 40,а) и соответствующий дельта-код (рисунок 40, б).
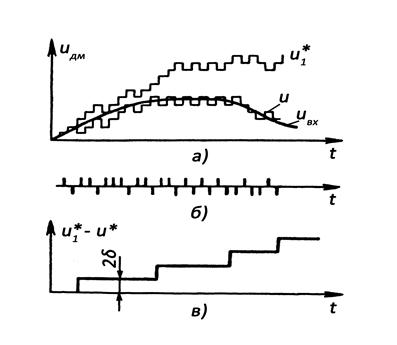
Рисунок 39 – Накопление ошибок при использовании в дельта-модуляторе
идеального интегратора
Пусть из-за действия помех в тракте передачи некоторые импульсы, обведенные пунктиром на рисунке 39,б, изменят свою полярность на обратную. Тогда формируемая в пункте приема копия сигнала u1*будет отличаться от u*,причем это отличие характеризуется скачком на 2 в моменты появления ошибок. Поскольку идеальный интегратор сохраняет напряжение на выходе бесконечно долго, ложные скачки напряжения, возникающие при наличии нескольких последовательных ошибок, будут накапливаться. Разностьu1* -u*, характеризующая погрешность системы передачи, с течением времени нарастает и в принципе может оказаться сколь угодно большой (рисунок 39,в). На практике для борьбы с этим явлением интегратор либо периодически разряжается до нуля, либо используется интегратор с утечкой, имеющий ограниченную постоянную времени.
Вывод:
При передаче изображений методом ИКМ с постоянным шагом квантования требуемая точность воспроизведения дискретных отсчетов определяется максимальной различительной способностью зрения, что приводит к необходимости использования семи-восьми символов в кодовой группе. В то же время при ДИКМ для передачи информации о приращении отсчета достаточно четырех-пяти знаков. При равной скорости цифрового потока величина отношения сигнал-шум при ДИКМ выше, чем при ИКМ на 6 дБ;
В системе с ДИКМ и ДМ устройство АЦП является индивидуальным оборудованием. Абонентский тракт при ДМ является четырехпроводным, при ИКМ – двухпроводным. Поэтому в расчете на один канал оборудование при ДМ оказывается более дорогим, чем при ИКМ.
Контрольные вопросы:
1. В чем состоит принципиальная разница между импульсно-кодовой и дифференциальными методами цифровой модуляциями?
2. В чем заключается принцип дифференциальной импульсно-кодовой модуляции (ДИКМ)?
3. В чем выражается зависимость между величиной разности напряжений uр=uвх-u*и шагом квантования?
4. Где и почему находит наибольшее применение ДИКМ?
5. В чем заключается принцип дельта-модуляции?
6. Что такое дельта-код?
7. Что такое перегрузочная характеристика, причины возникновения перегрузки крутизны сигнала?
| <== предыдущая страница | | | следующая страница ==> |
| Дифференциальная импульсно-кодовая модуляция | | | Кодирующие устройства с линейной шкалой квантования |
Дата добавления: 2014-09-10; просмотров: 729; Нарушение авторских прав

Мы поможем в написании ваших работ!