Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Становление и развитие теории регулирования и управления
Основные направления и этапы развития ТАУ. Основные понятия и определения. Структурные схемы САУ. Классификация САУ.
1. Возникновение, развитие и основные понятия теории управления
Становление и развитие теории регулирования и управления
Теория управления как самостоятельное научное направление сложилась в 20-м веке. Причем широкое международное развитие теории управления, именуемой на первых этапах своего становления теорией автоматического регулирования и управления (ТАР и ТАУ), приходится на вторую половину двадцатого века. Основной вклад в становление и развитие ТАР и ТАУ внесли советские ученые. В 1936 г. в СССР началось издание первого в мире специализированного журнала «Автоматика и телемеханика», а первый специализированный Институт автоматики и телемеханики (ИАТ) создан в 1939 г. Впоследствии ИАТ был переименован в Институт проблем управления (ИПУ). При плановой экономике ИАТ (ИПУ) совместно с другими академическими и отраслевыми институтами и вузами страны обеспечивал в СССР (в дальнейшем в странах Совета Экономической Взаимопомощи (СЭВ)) координацию работ и мировое лидерство отечественной теоретической и прикладной науки управления на протяжении длительного периода. Конгресс по автоматическому регулированию в Гейдельберге (ФРГ), организованный в сентябре 1956 г. группой автоматического регулирования союза электротехников и инженеров VDE/VOI, принял рекомендацию о подготовке создания Международной Федерации по автоматическому управлению (ИФАК), а I Международный конгресс ИФАК состоялся в 1960 г. в г. Москве.
История развития теории управления непосредственно связана с историей развития автоматизации. Особенности развития автоматизации довольно четко проявились в наиболее ранних широко используемых автоматических устройствах, например «ловушках», которые были первыми достаточно распространенными автоматами в эпоху первобытного общества (для охоты на животных), обеспечивающими выполнение соответствующей работы без непосредственного участия человека. Чтобы сделать их более совершенными, способными заменить человека с максимальной эффективностью, людям приходилось учитывать множество факторов: повадки животных, природные условия и т.п. Для ранних периодов развития техники ловушки становятся наиболее прогрессивными устройствами, в значительной степени концентрирующими передовые технические достижения.
В рабовладельческом обществе преимущественно развиваются автоматы, предназначенные для развлечения и потребностей культа. Среди них уже преобладают устройства, объединяющие значительное количество фигур и предметов, способных осуществлять сложные, взаимосвязанные движения. В них же получают дальнейшее развитие отдельные детали и механизмы, используемые в ловушках.
Автоматизация в эпоху феодализма в основном характеризовалась изготовлением часов, в создании которых большую роль играли искусство механиков, мастерство ремесленников, обеспечивающих точность и чистоту обработки деталей, труд ученых, позволивший создать маятник, баланс, анкерный ход и т.п. На базе часового механизма развивалась вся теория производства равномерных движений (работы Галилея, Гюйгенса и др.). Часы явились наиболее популярным механизмом, давшим определенные предпосылки для развития технического прогресса вообще и машинной индустрии в частности. На базе часового механизма и построенных на его основе механических театров создаются детали и узлы, которые позже в модифицированной форме широко используются в машиностроении.
Кроме часов, основой подготовительной работы для перехода к машинной индустрии стали мельницы. В них действовали такие высокоавтоматизированные устройства, как просеивающий механизм и механизм потряски. В мельнице уже имелись все существенные элементы машины: двигатель, передаточный механизм и рабочая машина. Дальнейшее развитие мельниц послужило толчком к созданию учения о трении, к проведению математических исследований о формах зубчатой передачи, зубьев и т.д.
Главная особенность мельничного механизма – относительная самостоятельность (автоматичность) его действия. После подачи зерна в приемник оно размалывалось без непосредственного участия человека. Последний в основном только регулировал и контролировал этот процесс. Вскоре мельницей стали называть всякую мануфактуру, применяющую водяной двигатель. К 16-му веку мельницы приобретают «универсальный» характер и используются в кузнечном, металлургическом, металлообрабатывающем и других производствах.
Огромным толчком в развитии средств автоматизации явилось появление рабочих машин, обусловивших начало технического переворота и промышленной революции конца 18-го и начала 19-го веков. В качестве первых рабочих машин выступили суппорт и прядильный механизм – устройства, автоматизирующие соответствующие рабочие процессы. С этого момента стало налаживаться производство машин машинами. Наиболее известные факты создания различных средств автоматизации:
- маятниковый регулятор хода часов (X. Гюйгенс, 1675 г.);
- поплавковый регулятор питания котла паровой машины (И.И. Ползунов, 1765 г.);
- центральный регулятор скорости паровой машины (Дж. Уатт, 1784 г.);
- первое программное устройство управления ткацким станком от перфокарты (Ж. Жаккар, 1808 г.);
- регуляторы (Ж. Понселе, братья Сименс, 1830 г.).
Наиболее известным и характерным примером автоматического устройства, примененного в паровой машине, является регулятор. Одним из первых автоматических регуляторов был поплавковый регулятор И.И. Ползунова, поддерживающий требуемый уровень воды в котле. Дж. Уатт снабдил свою паровую машину центробежным регулятором угловой скорости (рис. 1.1).
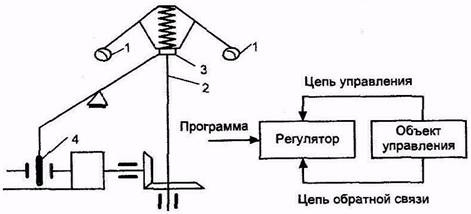
Рис.1.1 - Схема центробежного регулятора паровой машины Уатта
Регулятор Уатта состоял из двух грузов (1), подвешенных на шарнирах вдоль оси вертикального вала (2). Рычаги этих грузов связаны с муфтой (3), соединенной с заслонкой (4). Положение этой заслонки определяет сечение отверстия, через которое пар поступал из котла в цилиндр паровой машины.
Конструкция рычагов и заслонки выбиралась таким образом, чтобы сечение отверстия для прохода пара обеспечивало вращение вала с заданной скоростью.
Если эта скорость превышала заданную величину, центробежная сила грузов увеличивалась, вследствие чего грузы поднимались, перемещали муфту (3) и заслонку (4). Если подача пара в машину уменьшалась, то уменьшалась угловая скорость вала (2). При этом грузы опускались и двигали заслонку (4) вверх. В этом простейшем устройстве грузы являются и измерителем отклонения угловой скорости от заданного значения и исполнительными устройствами, осуществляющими управление заслонкой. Регулятор Уатта часто приводится как наиболее ранний и наиболее типичный пример обратной связи. Действительно, если представить себе общую схему автоматического управления с обратной связью, то в нее обязательно должны входить: регулятор, цепь управления, объект управления и цепь обратной связи.
Таким образом, осуществляется некая замкнутая система, действующая автоматически. В ней посредством различных приборов собирается информация о состоянии объекта управления, затем она направляется по цепи обратной связи в регулятор, который на основе полученной информации и заданной программы вырабатывает определенные сигналы управления, поступающие по цепи управления к объекту. Принцип работы регулятора полностью соответствует общей схеме, причем он, заменяя человека, уже выполняет некоторую управляющую функцию: «... если скорость машины больше требуемой, следует уменьшить выпуск пара, если меньше, то впуск пара надо увеличить».
Во второй половине 19-го века только в одной Англии работало более 75 тысяч паровых машин, управляемых простым центробежным регулятором Уатта. В промышленности часто происходили нарушения устойчивости системы «паровая машина – регулятор». В журналах тех лет имеется множество описаний таких случаев и призывов к ученым и инженерам разобраться в природе явления, реально сдерживающего промышленный прогресс. Отметим, что в истории техники не отмечается подобного относительно автоматов, созданных в древнем мире или в средних веках. Все это, естественно, стимулировало проведение теоретических исследований. Результаты этих исследований печатаются, начиная с 30-х годов 19-го века. Первой известной публикацией в современной литературе считается работа Д.С. Чижова (1823 г). Однако до конца 60-х годов 19 века в теоретических исследованиях регуляторов отсутствует, выражаясь современным языком, системный подход. Коренные изменения в подходе к проблеме и в методологию исследования внесли фундаментальные теоретические работа Д.К. Максвелла «О регуляторах» (1868 г.) и работы И.А. Вышнеградского «Об общей теории регуляторов» (1876 г.) и «О регуляторах прямого действия» (1877 г.). Максвелл и Вышнеградский осуществили системный подход к проблеме, рассмотрев регулятор и машину как единую динамическую систему. Они упростили задачу, перейдя к исследованию малых колебаний и линеаризовав сложные дифференциальные уравнения системы, что позволило разработать общий методологический подход к исследованию разнородных систем, заложить основы теории устойчивости, особенно актуальной для того времени, и установить ряд важных общих закономерностей регулирования по принципу обратной связи.
Исключительно важную роль в то время сыграла работа И.А. Вышнеградского, отличавшаяся глубоким инженерным подходом, рассмотрением самых злободневных для техники тех лет объектов и содержавшая, кроме ценных практических рекомендаций, также истоки ряда современных методов исследования устойчивости и качества регулирования (диаграммы устойчивости и распределения корней, выделение областей устойчивости и монотонности и др.).
Именно Вышнеградский является основоположником теории автоматического регулирования.
Работа Максвелла осталась малозамеченной современниками, так как она рассматривала объект, который мы теперь называем астатическим, а на практике в то время применялись статические регуляторы. Ее роль была оценена позднее, когда теория автоматического регулирования сформировалась в самостоятельную научную дисциплину.
Уже в те годы теория регулирования стала стимулировать математические разработки. По призыву Максвелла Раус разработал алгоритм для оценки расположения корней характеристического уравнения и устойчивости. По просьбе Стодолы Гурвиц вывел детерминантный критерий устойчивости. Работы словацкого инженера Стодолы занимают видное место в теории устойчивости регулирования паровых и гидравлических турбин. Он попытался учесть влияние длинного трубопровода на процесс регулирования и получил при этом интересный результат. Крупный вклад в теорию регулирования внесен Н.Е. Жуковским, автором труда «О прочности движения» и первого русского учебника «Теория регулирования хода машин» (1909 г.). Н.Е. Жуковский дал математическое описание процессов в длинных трубопроводах, рассмотрел влияние сухого трения в регуляторах, исследовал некоторые процессы импульсного регулирования.
В периодизации развития теории управления мы опираемся на авторитет известных ученых в этой области науки М.А. Айзермана и А.А. Красовского.
Согласно их точки зрения описываемый период развития ТАР вплоть до создания в Москве в 1939 г. ИАТ следует считать предысторией ТАР и ТАУ. Согласно Красовскому таблица 1.1 иллюстрирует предысторию ТАР и ТАУ, математической теории управления, изобретений и открытий в России, СССР и за рубежом.
Таблица 1.1 - Предыстория ТАР ТАУ. Изобретения, открытия и научные труды
| Российские | Зарубежные | ||
| Год | Автор | Год | Автор |
| Ползунов И.И. | Уатт Д. | ||
| Чижов Д.С. | Понселе | ||
| Ястржембский Н.Ф. | Сименс, Винер, Вильгельм | ||
| Давыдов А.Ю. | |||
| Вышнеградский И.А. | Максвелл Д.К. Раус Е. Пуанкаре | ||
| Чебышев П.Л. | Лейт | ||
| Жуковский Н.Е. | Стодола А. | ||
| Чиколев В.Н. | Гурвиц А. | ||
| Ляпунов А.М. | |||
| Грдина Я.И. | Минорски Н. | ||
| Рерих К.Э. | |||
| Вознесенский И.Н. | Ван дер Поль Б. | ||
| Андронов А.А. | Биркхофф Г. | ||
| Шенфер К.Н. | Найквист Х. | ||
| Николаи Е.Л. | |||
| Котельников В.А. | Боде | ||
| МакКолл Л. | |||
| Шеннон В. |
К сожалению, объем курса не позволяет дать полную характеристику развития ТАР и ТАУ, но наиболее важные научные результаты ученых и инженеров будут рассмотрены далее.
В развитии ТАР и ТАУ традиционно выделяют период классической инженерной теории автоматического регулирования (1939 – 1957 гг.) и период современной теории автоматического управления (СТАУ). Начало ее формирования А.А. Красовский относит к 1957 г., в котором резко увеличилось количество научных статей по математической теории управления. Другие ученые (например, А.А. Воронов) связывают начало периода СТАУ с широко известным временем проведения I Международного конгресса ИФАК. Имеются и иные точки зрения на периодизацию теории управления. Для наших целей упомянутая неоднозначность не имеет существенного значения. Важно то, что в развитии теории управления имеются три периода: предыстория, период классической ТАР и ТАУ и период СТАУ. Особенности этих периодов читателю будут понятны по мере изучения следующих разделов настоящей книги. В заключение подчеркнем, что теория управления продолжает интенсивно развиваться и широко применяется практически во всех сферах человеческой деятельности.
Подобно тому, как в прошлом 19-м веке с ее помощью были решены упомянутые выше проблемы промышленности того времени, так и в наше время на основе СТАУ идет интенсивный поиск решения проблем современности. В этой связи из многочисленных научных работ последнего времени следует отметить доклад Ю.И. Неймарка «Теория управления как наука, которая может и должна помочь человеку в решении социально-экономических и экологических проблем», который был сделан на Международной конференции по проблемам управления, состоявшейся в Москве в ИПУ 29 июня - 2 июля 1999 года.
Основные понятия и определения
В окружающем нас мире повсюду протекают различные процессы управления. Суть всякого управления состоит в организации и реализации целенаправленного воздействия на объект управления, т.е. управление представляет собой процесс выработки и осуществления управляющего воздействия по переводу объекта в желаемое состояние.
Понятие «управление» связано с такими сходными понятиями, как «объект управления», «управляющее воздействие», «цель управления». Уточним эти понятия с точки зрения общих принципов системных исследований.
Объект управления – это объект, для достижения желаемых результатов функционирования которого необходимы и допустимы специально организованные воздействия.
Объектами управления могут быть как отдельные объекты, выделенные из окружающей среды по определенным признакам (например, конструктивным, функциональным), так и совокупности объектов – комплексы. В зависимости от свойств или назначения объектов управления могут быть выделены технические, технологические, экономические, организационные, социальные и другие объекты управления и комплексы.
Объект управления выделяется из окружающей среды таким образом, чтобы выполнялись по меньшей мере два условия:
- на объект можно воздействовать;
- это воздействие может приблизить нас к осуществлению поставленных целей в объекте, т.е. изменить его состояние в желаемом для нас направлении.
Первым этапом всякого управления является выделение объекта управления и выявление каналов воздействия F, Y, U (рис.1.2).
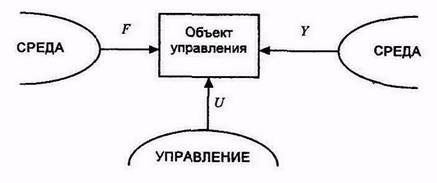
Рис.1.2 - Объект управления и его взаимодействие со средой и управлением
Здесь F – канал воздействия среды на объект, Y – канал воздействия объекта на среду, U –канал воздействия управления на объект.
Понятие «воздействие» при решении задач управления рассматривается только в информационном смысле.
Выделение объекта управления и выделение каналов воздействий производится только с точки зрения заданной цели управления.
Цель управления – это определенные значения или соотношения значений координат процессов в объекте управления или их изменения во времени, при которых обеспечивается достижение желаемых результатов функционирования объекта. Другими словами, цель управления – это совокупность условий, свойств и требований, которым должен удовлетворять объект управления. Таким образом, цель как бы генерирует объект управления или, по крайней мере, определяет его описание как объекта управления.
Например, предприятие с точки зрения целей его учредителей выступает в качестве производителя товара, потребляет на входе F природные ресурсы, товары и капитал и одновременно производит на выходе Y свои товары и капиталы в виде прибыли. Цели экологов превращают это же предприятие в преобразователь сырья во вредные отходы. Итак, объект управления и каналы его взаимодействия со средой полностью определяются целями управления.
Процесс управления является процессом организации и реализации целенаправленного воздействия на объект. Но сам процесс организации также целенаправлен, т.е. процесс управления подразумевает наличие умения, способности создавать целенаправленное воздействие. Эти свойства и определяют алгоритм управления.
Алгоритм управления - это инструкция о том, как добиваться целей управления в различных ситуациях. Алгоритм управления реализуется управляющим устройством (управляющим объектом).
Объединим объект управления и управляющее устройство в систему управления (рис. 1.3).
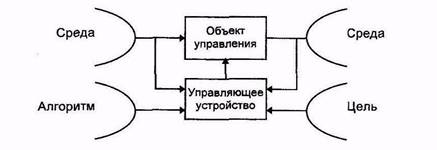
Рис. 1.3 - Система управления и ее взаимодействие со средой
Система управления – это такая совокупность объекта управления и управляющего устройства, процесс взаимодействия которых приводит к выполнению поставленной цели управления. Из изложенного выше следует, что цель и алгоритм управления по отношению к системе управления имеют внешний характер. Это обусловлено тем, что цель управления и алгоритм управления определяются не данной системой управления, а другой системой, имеющей по отношению к рассматриваемой более высокий уровень иерархии. Таким образом, суть понятия «управление» охватывает три основные группы действий, которые можно описать схемой, представленной на рис.1.4.
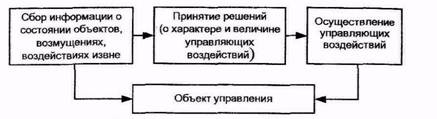
Рис. 1.4 - Система управления
В настоящее время в теории и технике управления используется несколько определений понятия «управление».
1) Согласно ГОСТ 19174-72, управление – это процесс осуществления воздействий, соответствующих алгоритму управления.
2) Международный электротехнический словарь (Гл.351: Автоматическое управление-1972 г.) считает, что управление – процесс осуществления воздействий на управляемый объект (систему) с целью удовлетворения им заданной совокупности предписаний.
3) Согласно ГОСТ 19176-80, управление - процесс, обеспечивающий необходимое при использовании по целевому назначению протекание технологических процессов преобразования энергии, вещества и информации, поддержание работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнения.
Приведенные определения различаются объемом охватываемых действий, а также выбором причин этих действий.
Определениями 1 и 2 объем действий ограничивается только осуществлением воздействий на объект. Определение 3 фактически полностью охватывает основные три группы действий, составляющих суть понятия «управление» и представленных на рис. 1.4. В определениях 1 и 2 причиной управления является алгоритм управления, а в определении 3 - цель управления (использование по целевому назначению).
Именно цель является наиболее универсальной причиной, так как охватывает все известные случаи управления: и те, когда алгоритм управления заранее известен, и те, когда управляющие воздействия определяются только на основе знания цели. Следовательно, изложенные выше основные понятия теории управления соответствуют как общим принципам системных исследований, так и известным стандартам. Конкретизируем эти понятия применительно к теории автоматического управления (ТАУ), которая изучает процессы управления, методы исследования и основы проектирования систем автоматического управления (САУ) (рис. 1.5).
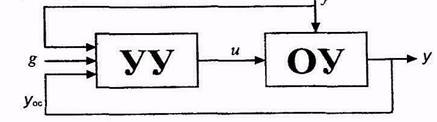
Рис. 1.5 - Система автоматического управления
Управляющее устройство (УУ) вырабатывает управляющие воздействия u(t), которые воздействуют на объект управления (ОУ) и поддерживают на заданном уровне или изменяют по определенному закону выходную величину y(t). Помимо управляющих воздействий к ОУ приложены также и возмущающие воздействия f(t), нарушающие требуемую функциональную связь между выходной величиной ОУ и задающим воздействием g(t).
Управляющее воздействие – это воздействие на объект управления для достижения цели управления.
Задающее воздействие - воздействие на УУ, предназначенное для достижения целей управления и определяющее требуемый закон (алгоритм) управления выходной величины ОУ.
Выходная величина – это обычно главный технологический параметр - скорость, мощность, и т.д.
Возмущение – внешнее воздействие на любое звено (элемент, подсистему) САУ, затрудняющее достижение цели управления. Обычно выделяют основные возмущения, существенно влияющие на регулируемую величину, и помехи, вызывающие искажение сигналов в САУ, незначительно влияющие на регулируемую величину и труднодоступные для измерения.
Обратная связь в САУ уос(t) – зависимость y(t) от текущих воздействий на ОУ и от его состояния, обусловленного предшествующими воздействиями на объект. Обратная связь может быть естественной (присущей объекту) или искусственно организованной.
Все перечисленные величины могут быть как скалярными, так и векторными.
В схеме САУ (рис. 1.5), которая является наиболее общей функциональной схемой, на УУ поступает три вида информации:
- о выходной величине y, определяющей состояние ОУ;
- о величине g, задающей цель управления;
- о возмущениях f, нарушающих режим работы ОУ.
Возможны также САУ, в которых используется лишь часть перечисленной информации. При этом в зависимости от того, какой вид информации используется, различают два основных вида САУ: разомкнутые и замкнутые.
Разомкнутые САУ – это системы, в которых значение выходной величины ОУ не подается на вход УУ, т.е. нет контроля за состоянием ОУ. Разомкнутыми такие системы называются также потому, что в них отсутствует обратная связь между выходом ОУ и входом УУ, при наличии которой ОУ и УУ образуют замкнутый контур. Возможны разомкнутые САУ, в которых УУ измеряет только задающее воздействие g, только возмущение f и, наконец, оба эти сигнала одновременно. Первый вариант разомкнутой САУ называется САУ по задающему воздействию. Второй вариант называется САУ по возмущению, или системой автоматической компенсации. САУ по задающему и возмущающему воздействиям является наиболее полным видом разомкнутой САУ.
В замкнутых САУ на вход УУ подаются задающее воздействие g и выходная величина у. Исходя из величины g, УУ определяет соответствующее требуемое значение у, и на основе информации о текущем значении у обеспечивает необходимое соответствие между у и g путем воздействия на ОУ. В такой САУ УУ стремится ликвидировать все отклонения выхода ОУ от его значения, определяемого заданием цели управления, независимо от причин, вызвавших это отклонение, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы. САУ такого типа представляет собой замкнутый контур, образованный ОУ и УУ. При этом УУ создает обратную связь вокруг ОУ, связывая его выход с входом, поэтому замкнутые САУ называют еще системами с обратной связью (системами управления по отклонению). Это основной тип САУ.
Есть еще и комбинированные САУ, которые представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздействию.
Схема на рис. 1.5 является схемой такой комбинированной САУ. Комбинированные САУ обладают лучшими характеристиками. В них наиболее полно используется информация об ОУ и внешней ситуации (среды).
| <== предыдущая страница | | | следующая страница ==> |
| Операционный метод и передаточная функция | | | Типовые функциональные схемы САУ |
Дата добавления: 2014-11-14; просмотров: 1175; Нарушение авторских прав

Мы поможем в написании ваших работ!