Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Общие сведения. Структура и состав глобальных навигационных спутниковых систем
ПРИМЕНЕНИЕ ГЛОБАЛЬНЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ, СЪЕМКИ И СОСТАВЛЕНИЯ КАРТ
Использование глобальных навигационных спутниковых систем (ГНСС) при определении местоположения пунктов имеет существенные преимущества по сравнению с традиционными геодезическими методами:
исключается необходимость располагать определяемые пункты геодезических сетей, например опорных межевых, с условием их взаимной видимости;
расстояния между определяемыми пунктами могут составлять десятки километров;
возможны наблюдения в любую погоду, как в дневное, так и в ночное время;
измерения и обработка результатов почти полностью автоматизированы;
возможно получение координат геодезических пунктов, поворотных точек границ земельных участков, съемочных станций, характерных точек объектов недвижимости в реальном масштабе времени и др.
В настоящее время функционируют две глобальные навигационные спутниковые системы: Российская ГЛОНАС и система GPS, разработанная в США. Внедрение глобальных навигационных спутниковых систем в практику земельно-кадастровых геодезических работ в корне изменило процесс полевых измерений, существенно сократив время, затрачиваемое на них, и значительно повысив точность получаемых результатов.
В то же время, рассматриваемые далее системы имеют ряд ограничений, связанных, например, с необходимостью наличия «радио видимости» с определяемой точки местности не менее четырех (а в некоторых случаях и более) входящих в ГНСС навигационных искусственных спутников земли, что в условиях застроенной или залесенной территории не всегда возможно. Поэтому традиционные способы построения геодезических опорных сетей в виде полигонометрии, линейно-угловых построений и т. п. достаточно широко применяют при проведении земельно-кадастровых работ.
Для достижения таких важных качеств ГНСС, как непрерывность и высокая точность измерений, в их составе функционируют три основных сегмента: контроля и управления, космический и потребителя (пользователя).
Сегмент контроля и управления. Это комплекс наземных средств, обеспечивающих непрерывные наблюдения и контроль над работой всей системы. Одна из составляющих этого сегмента — равномерно расположенная на поверхности Земли, в том числе и на территории России, космическая геодезическая сеть.
Космический сегмент. В глобальной навигационной спутниковой системе (ГНСС) он включает в себя созвездие навигационных искусственных спутников Земли (НИСЗ), вращающихся вокруг Земли на строго определенных орбитах.
Размеры и форма эллиптической орбиты характеризуются размером ее большой полуоси а и эксцентриситета е. В системе GPS большая полуось и эксцентриситет примерно равны 26560км и 0,001 соответственно.
Положение плоскости орбиты относительно экваториальной плоскости Земли характеризуют (рис. 7.1): долгота восходящего узла W, аргумент перигея w и угол i наклона плоскости орбиты к плоскости экватора. Например, для системы GPS: w = 80°, i = 55°.
Положение навигационного искусственного спутника земли на орбите описывает радиус-вектор r (рис. 5.1), который определяют по формуле
 ,
,
где P=a(1 – e2); e – эксцентриситет орбиты; n- истинная аномалия (выражается в градусной мере).
Составляющие радиус-вектора (его пространственные инерциальные геоцентрические прямоугольные координаты XC, YC, ZC)имеют следующий вид:
XC = r(cosWcosU - sinWsinUcosi);
YC = r(sinWcosU + cosWsinUcosi);
ZC = rsinUsini,
Где U – аргумент широты, U = w +u.
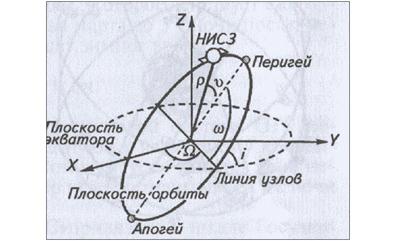
Рис. 7.1. Основные элементы орбиты НИСЗ
При невозмущенном движении НИСЗ параметры W, i, w, r, e постоянны и не меняются при движении спутника по орбите. При этом истинная аномалия n характеризует положение спутника на орбите в определенный момент времени, называемый «эпохой».
В ГНСС GPS навигационные искусственные спутники Земли размещены на шести орбитальных плоскостях по четыре НИСЗ в каждой. Высота орбит 20145км (рис. 7.2). Восходящие узлы орбит в ГНСС GPS расположены равномерно по экватору и отстоят друг от друга по долготе на 60° на восток.
В глобальной навигационной спутниковой системе ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите. Всего 24 искусственных спутника Земли (рис.7.3). Тип орбиты — круговой. Высота орбиты 19100км, наклонение орбиты 64,8°. Период обращения — примерно 12 ч.
При невозмущенном движении НИСЗ параметры орбиты в каждый фиксированный момент времени постоянны и не меняются при движении спутника по орбите. Пространственное положение НИСЗ характеризуют его «бортовые эфемериды», включающие в себя пространственные прямоугольные координаты НИСЗ (в системе координат WGS-84 для GPS и в системе ПЗ-90 для ГЛОНАСС) на определенный момент времени tk (на определенную эпоху).
Бортовые эфемериды вычисляются в результате обработки измерений, выполняемых сегментом контроля и управления. По результатам соответствующих измерений бортовые эфемериды загружаются на НИСЗ несколько раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения НИСЗ и др.) на точность абсолютного положения определяемых пунктов не превышает для системы ГЛОНАСС — 9,2м, системы GPS — 1м.
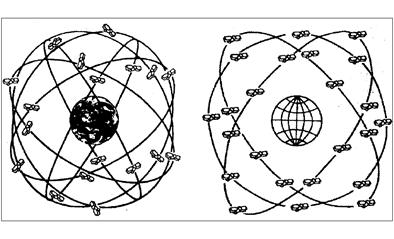
Рис. 7.2. Созвездия НИСЗ систем GPS и ГЛОНАСС
Навигационный искусственный спутник Земли движется по орбите в некоторой шкале времени.
В глобальных навигационных спутниковых системах используют следующее время: всемирное (гринвичское среднее солнечное); всемирное координированное; поясное; местное декретное; летнее.
Всемирное (гринвичское среднее солнечное) время UT содержит год, месяц, число, час, минуту и секунду. При этом первые три величины — год, месяц и число — отсчитывают по общепринятому (Григорианскому) календарю, час, минуту и секунду — по местному среднему времени на гринвичском меридиане. Всемирное время tUT измеряют часовым углом «среднего солнца» относительно гринвичского меридиана, увеличенного на 12ч. Всемирное координированное время UTC измеряют по атомным часам и передают по радиовещательным сетям. Время UTC используют в повседневной жизни.
Поясное время ZT так же, как и время UT, содержит год, месяц и число. Однако часы, минуты и секунды в поясном времени соответствуют местному среднему времени основного (центрального) географического меридиана определенного часового пояса tП, значение которого вычисляют по формуле
ZT = UTC + Dn,
где Dn – номер часового пояса.
Поясное время введено в России с 1919г. При этом поверхность Земли была разделена на 24 часовых пояса, центральные меридианы которых отличаются по долготе на 15° (1 ч). Например, для Москвы Dn = 2.
Местное декретное время отличается от поясного времени ZT на декретную добавку Dtдкр, устанавливаемую для каждого региона законодательным порядком. В России в качестве местного декретного времени действует летнее время tл, которое действует ежегодно с 2 ч ночи последнего воскресенья марта до 3 ч ночи последнего воскресенья октября, когда вводят зимнее время
Tзимн = ZT + 1 ч.
В глобальной навигационной спутниковой системе GPS используют шкалу времени, «привязанную» к всемирному координированному времениUTC. При этом в системе имеется свой недельный календарь, в котором номер недели отсчитывается с ночи с 5-го на 6-е января 1980г.
Российская система «ГЛОНАСС» привязана к шкале Государственного эталона частоты и времени России UTC (SU).
Принцип определения месторасположения с помощью глобальной навигационной спутниковой системы предусматривает измерение расстояний (дальностей) между искусственными спутниками Земли и фазовым центром антенны приемника спутниковых сигналов, установленного на определяемой точке местности.
С целью реализации данного принципа каждый НИСЗ излучает радиосигналы, структура которых для системы GPS показана на рисунке 7.3.

Рис. 7.3. Радиосигналы системы GPS
Одновременно в радиолинии частотного диапазона L1 спутники системы GPS излучают кодовые последовательности стандартной (Р-код) и высокой (С/А-код) точности. Также излучается несущий электромагнитный сигнал частотой L2.
При необходимости сигнал С/А-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код.
В системе ГЛОНАСС каждый спутник работает на собственной частоте. Разделение сигналов частотное. Так же, как и в GPS, несущие сигналы обозначают как L1 и L2, а Р-коду соответствует ВТ-код (код высокой точности) и СТ-код (код стандартной точности). Одновременно с измерительными сигналами с искусственного спутника земли передается хранящаяся на нем, так называемая, оперативная и неоперативная информация, сформированная в виде кадра навигационного сообщения.
Оперативная информация содержит: эфемериды ИСЗ (три пространственные прямоугольные координаты X, Y, Z, три составляющих скорости ИСЗ и три составляющих ускорения); метку времени; сдвиг шкалы времени НИСЗ относительно шкалы времени всей системы и другие сведения.
Неоперативную информацию образует альманах системы, содержащий параметры орбит всех спутников системы и другие сведения. Полный кадр (суперкадр) системы ГЛОНАСС и GPS передается в течение 10...12 мин
Сегмент потребителей. Основные задачи, решаемые приемной аппаратурой, относящейся к сектору потребителей, прием и первичная обработка сигналов ИСЗ.
Обработку сигналов выполняют с целью выработки необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т.д.). Упрощенная структурная схема приемной аппаратуры (приемника спутниковых сигналов) показана на рисунке 7.4.
Приемное устройство выполняет функции супергетеродинного приемника, а также первичную обработку сигналов. Соответствующие сигналы поступают в блок поиска и измерения. После завершения поиска происходит захват сигнала, который поступает в вычислительный блок. По указаниям оператора (наблюдателя) результаты соответствующей обработки, как правило, могут быть отражены на дисплее.

Рис. 7.4. Структурная схема приемника спутниковых сигналов
Обычно выделяют три модификации приемников. Приемники первого класса предназначены для быстрых навигационных определений координат. Такие приемники удобно использовать при рекогносцировке, выносе в натуру и съемке объектов с небольшой точностью. Приемники второго класса предназначены для определения положения движущихся объектов. Приемники третьего класса, как правило, относятся к приемникам геодезического назначения. В них имеется многоканальный блок, осуществляющий слежение одновременно за сигналами нескольких ИСЗ (до 12 и более). Внутренняя память приемника до 100 Мб и более. Приемники оснащены портами для интеграции с другой аппаратурой, в том числе ПЭВМ. Значительный практический интерес представляют собой совмещенные GPS/ГЛОНАСС приемники. В общем случае приемники геодезического назначения выполняют следующие функции:
генерация местной шкалы времени (местных эталонных колебаний);
поиск, усиление и разделение сигналов, принадлежащих различным ИСЗ;
фильтрация сигналов;
выделение из сигналов меток времени и псевдослучайных последовательностей;
слежение за частотой, фазой, кодовыми сигналами, измерение псевдодальностей до каждого НИСЗ;
прием установочных параметров и маркеров, фиксирующих внешние события;
выполнение различных оперативных расчетов;
выдача в форме индикации на дисплее контроллера соответствующей информации об установочных указаниях и параметрах, результаты измерений, например в форме геодезических координат, о наличии и состоянии участвующих в радиосеансе НИСЗ и др.;
прием поправок (при помощи специального радиоканала) в псевдодальности от внешнего передающего устройства;
передачу результатов спутниковых наблюдений на другие радиоприемные устройства, в том числе — телефоны сотовой связи; хранение принятой информации.
Конструктивно приемники, как правило, выполнены в виде отдельных или совмещенных блоков, которые содержат антенное устройство, контроллер (мини-ЭВМ с клавиатурой) и аккумуляторы. С помощью контроллера (встроенного или присоединяемого к приемнику), пользователь может управлять и контролировать процесс спутниковых наблюдений. Часто приемники имеют встроенный радиомодем, с помощью которого в реальном масштабе времени можно передать или принять по каналам связи необходимую информацию. К ней относятся, например результаты измерений, выполненные на определяемой точке, а также результаты соответствующих расчетов по этим измерениям, выполненным в специальном удаленном от места проведения измерений вычислительном центре.
Общий вид приемника спутниковых сигналов, включающего антенное устройство, собственно приемник и контроллер показан на рисунке 7.5.
Рис. 7.5. Приемник спутниковых сигналов
1 – антенна; 2 - контроллер
Выбор конкретного типа приемника спутниковых сигналов для проведения земельно-кадастровых геодезических работ зависит, прежде всего, от необходимой точности определения положения объектов.
Например, при создании и развитии опорной межевой сети первого класса (ОМС1) спутниковые приемники, помимо кодовых сигналов, должны принимать сигналы навигационных искусственных спутников земли на частотах L1 и L2. При развитии сети второго класса (ОМС2), а также при межевании земельных участков разрешается использование одночастотных приемников, работающих, помимо кодовых сигналов, только на частоте L1.
| <== предыдущая страница | | | следующая страница ==> |
| Характеристика точности площадей участков перенесенных в натуру | | | Принципы определения местоположения пунктов |
Дата добавления: 2014-02-28; просмотров: 2242; Нарушение авторских прав

Мы поможем в написании ваших работ!