Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Импульсный способ регулирования скорости исполнительных двигателей постоянного тока
Широтно-импульсный способ управления. Наиболее широкое применение из всех видов импульсного регулирования для управления двигателями постоянного тока нашло широтно-импульсное регулирование напряжения (ШИР).
При импульсном способе (рис 2.13) к микродвигателю подводятся импульсы неизменного по амплитуде напряжения управления Uу.ном,в результате чего его работа состоит из чередующихся периодов разгона и торможения. Если эти периоды малы по сравнению с полным временем разгона и остановки ротора, то угловая скорость ротора не успевает к концу каждого периода достигать установившихся значений и установится некоторая средняя угловая скорость ωcp. Значение ωcp при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется относительной продолжительностью импульсов ε:
ε = tи/Tи, (2.22)
где tи- длительность импульса; Ти - период.
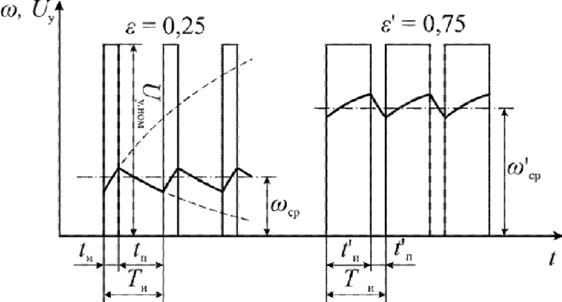
Рис.2.13
С увеличением относительной продолжительности импульсов (рис.2.13, ε'>ε) угловая скорость ротора растет ( ω'cp> ωcp).В период паузы tп ротор обязательно должен тормозиться. Если это условие не будет выполняться, то угловая скорость ротора при любом значении ε будет непрерывно увеличиваться, пока не достигнет значения угловой скорости х.х., так как во время импульса угловая скорость будет возрастать, а во время паузы – оставаться практически неизменной.
С ростом частоты управляющих импульсов амплитуда колебаний скорости уменьшается; среднее значение угловой скорости остается при этом неизменным.
Принципиальные схемы импульсного регулирования показаны на рис. 2.14.
Если к валу двигателя приложен статический момент нагрузки, приводящий к механическому торможению двигателя во время паузы, то возможно применение схемы (рис.2.14,а), в которой ключ К в течение одной части цикла подключает якорь непосредственно к источнику питания, создавая положительный момент (разгон), в течение же другой части – отключает якорь от источника питания (торможение). Если двигатель работает без или с малой статической нагрузкой, то возможно применение электрического торможения (динамического или противовключением) во время паузы. Например, в схеме на рис. 2.14,б ключ К переключает во время паузы якорь на сопротивление Rд для осуществления динамического торможения. В качестве ключевых элементов в современных схемах используются транзисторы или тиристоры; контактные электромагнитные реле, ввиду их низкого быстродействия, практически не применяются.
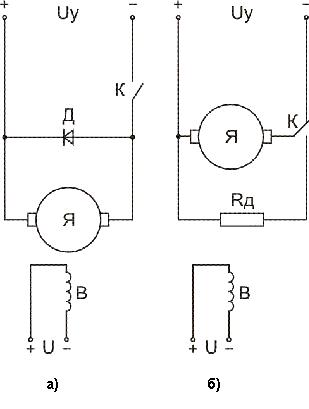
Рис.2.14
Рассмотрим механические и регулировочные характеристики исполнительного двигателя постоянного тока при импульсном управлении с торможением за счет статического момента сопротивления Mст на валу (рис.2.14,а). Под механической характеристикой при импульсном управлении понимают зависимость средней угловой скорости от среднего значения момента при неизменной относительной продолжительности импульсов ε. Под регулировочной характеристикой понимают зависимость средней угловой скорости ротора от относительной продолжительности импульсов ε при неизменном среднем моменте на валу двигателя.
В зависимости от параметров двигателя схемы управления и момента нагрузки возможны два основных режима работы двигателя: режим прерывистого тока и режим непрерывного тока.
Режим прерывистого тока характеризуется тем, что ток якоря течет во время импульса, а в течение основного времени паузы tп равен нулю. Этот режим может возникнуть в схеме рис. 2.14, а при τя < Tи (τя - электромагнитная постоянная времени обмотки якоря). Уравнение механических и регулировочных характеристик в относительных единицах имеет вид
ωcp*=1 - Mcp*/ε , (2.23)
Механические характеристики – линейные и начинаются из одной общей точки х.х.; жесткость механических характеристик уменьшается при уменьшении ε. Регулировочные характеристики – нелинейные; регулирование возможно только при Mcp* ≠ 0.
Режим непрерывного тока характеризуется тем, что во время паузы tп уменьшающийся ток якоря iя продолжает протекать по якорю в том же направлении, что и во время tи.
Этот режим может возникнуть, например, при регулировании по схеме рис. 2.14,а при Tи << τя. При отключении ключа К (пауза tп) ток якоря начинает уменьшаться. Возникает ЭДС самоиндукции якоря, стремящаяся поддержать в цепи ток прежнего направления. Направление ЭДС самоиндукции такое, что диод Д оказывается открытым и через него замыкается цепь для тока якоря iя.
При малой амплитуде колебаний мгновенной угловой скорости ток якоря iя и момент Mэм меняются незначительно, и уравнение механических и регулировочных характеристик в относительных единицах имеет вид, аналогичный (2.7):
ωcp* = ε - Mcp* , (2.24)
Механические и регулировочные характеристики будут иметь такой же вид, как и при непрерывном якорном способе управления (см.рис. 2.7) с заменой α на ε. Как видно, закон регулирования угловой скорости в режиме непрерывного тока получается линейным.
В реальных схемах импульсного управления режим работы двигателя в одном диапазоне моментов и угловых скоростей ближе к режиму непрерывного тока, в другом – к режиму прерывистого тока.
Механические и регулировочные характеристики для этого случая представлены на рис. 2.15. Граница перехода из одного режима в другой показана пунктирной линией (механические характеристики,рис.2.15,а). С целью обеспечения линейности регулировочных характеристик (рис.2.15,б) диапазон прерывистых токов стремятся сузить.
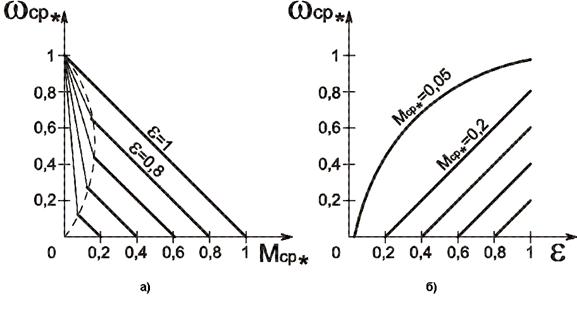
Рис.2.15
Основные преимущества импульсного способа управления – меньшее значение средней потребляемой двигателем мощности; возможность управления при нерегулируемом источнике постоянного тока, например, бортовой аккумуляторной батарее. Однако аппаратура управления в общем случае более сложная, чем при непрерывном управлении.
| <== предыдущая страница | | | следующая страница ==> |
| Непрерывный способ регулирования скорости исполнительных двигателей постоянного тока | | | ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ НА БАЗЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА |
Дата добавления: 2014-03-11; просмотров: 729; Нарушение авторских прав

Мы поможем в написании ваших работ!