Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
СИСТЕМЫ ПОЗИЦИОНИРОВАНИЙ ПНЕВМОПРИВОДОВ ПРОМЬШЛЕННЫХ РОБОТОВ
Управляющее устройство привода вырабатывает управляющие воздействия (сигналы) поступающие на пневмораспределители, обеспечивающие перемещение выходного звена привода в соответствии с сигналом, поступающим от системы управления роботом.
Различают приводы с управлением по разомкнутому и замкнутому контуру.
Управление по разомкнутому контуру осуществляется без использования управляющим устройством информации о состоянии привода (о положении, скорости выходного звена, давлении в полостях и т.п.).
Управление по замкнутому контуру осуществляется с использованием информации о текущем состоянии привода, поступающей в управляющее устройство по каналам обратной связи.
Различают приводы с непрерывным и релейным управлением.
Непрерывному управлению соответствует непрерывное изменение в распределительном устройстве величины перекрытия подводящих и отводящих каналов.
При релейном управлении управляющее устройство переводит распределительное устройство привода в одно из двух состояний, соответствующих максимальному открытию и максимальному закрытию подводящих и отводящих каналов. Переход из одного состояния в другое осуществляется за пренебрежимо малое время.
СИСТЕМЫ ПОЗИЦИОНИРОВАНИЙ ПНЕВМОПРИВОДОВ ПРОМЬШЛЕННЫХ РОБОТОВ
2.1. Классификация систем позиционирования
В манипуляционных роботах с цикловой и позиционной системами управления основной задачей, решаемой устройством управления привода, является позиционирование выходного звена привода в заданной точке.
Существует множество различных способов и соответствующих им систем позиционирования выходного звена пневмопривода.
Классификационная схема систем позиционирования (СП) пневмоприводов представлена на рис. 2.1.
 |
Рис. 2.1. Классификационная схема систем позиционирования
Среди СП выделяют два наиболее крупных класса: системы с дискретным и непрерывным позиционированием.
При дискретном позиционировании выходное звено пневмопривода занимает одно из устойчивых положений, составляющих конечное множество.
При непрерывном позиционировании множество устойчивых положений, которое может занимать выходное звено, составляют непрерывную последовательность
2.2. Системы дискретного позиционирования
Управление пневмоприводами с дискретной системой позиционирования осуществляется, как правило, по разомкнутому контуру.
 Среди дискретных систем позиционирования выделяют: системы позиционирования по упорам (рис. 2.2), шаговые и цифровые СП.
Среди дискретных систем позиционирования выделяют: системы позиционирования по упорам (рис. 2.2), шаговые и цифровые СП.
 | |||
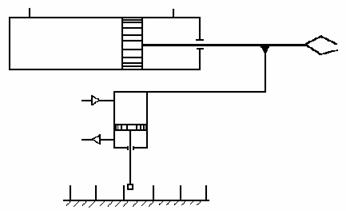 |
Рис.2.2. Системы позиционирования по упорам
Положение упоров может регулироваться при наладке робота. Этим достигается перепрограммирование точек позиционирования.
Шаговые системы позиционирования осуществляют перемещение выходного звена пневмопривода на целое число шагов (дискрет).
Среди шаговых СП можно выделить системы последовательного и прямого позиционирования.
В шаговых системах последовательного позиционирования выходное звено перемещается на число дискрет, равное числу управляющих импульсов, поступивших в блок управления приводом, переходя в заданную точку с последовательной остановкой в промежуточных.
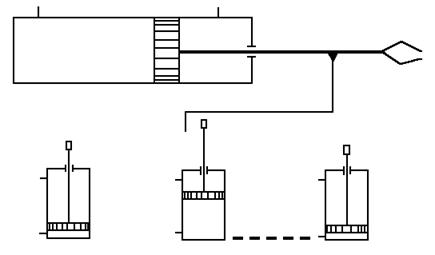
На рис. 2.3 приведена схема шагового пневмопривода последовательного позиционирования. В исходном состоянии перемещение штанги 3 под действием перепада давлений в полостях 1,2 сдерживается упором 4. При подаче давления в полость плунжера 6 упор 4 опускается и освобождает штангу 3. Штанга перемещается на половину шага до встречи выступа штанги с упором 5. При снятии давления в полости плунжера 6 упор 5 под действием пружины 7 опускается, и штанга 3 перемещается еще на полшага до встречи очередного выступа с упором 4. Таким образом, каждому импульсу (подаче и снятию давления) соответствует перемещение выходного звена привода на один шаг.
 |
Рис. 2.3. Схема шагового пневмопривода последовательного позиционирования
При изменении соотношения давлений в полостях 1 и 2 аналогичным образом осуществляется движение в обратном направлении.
 В шаговых системах прямого позиционирования выходное звено перемещается в одну из точек позиционирования, отстоящих друг от друга на целое число дискрет, без остановки в промежуточных точках. На рис 2.4 представлена схема пневмопривода прямого позиционирования.
В шаговых системах прямого позиционирования выходное звено перемещается в одну из точек позиционирования, отстоящих друг от друга на целое число дискрет, без остановки в промежуточных точках. На рис 2.4 представлена схема пневмопривода прямого позиционирования.
Рис 2.4 Схема пневмопривода прямого позиционирования
В этом приводе поршень 1 при открытии одного из клапанов 2 под действием возникающего перепада давлений перемещается в положение, соответствующее перекрытию канала, соединенного с открытым клапаном.
Цифровые системы позиционирования характеризуются наличием суммирующих механизмов, состоящих из нескольких элементов с фиксированными ходами, перемещающими выходное звено привода на величину, равную алгебраической сумме ходов этих элементов.
 На рис. 2.5 приведена схема многопоршневого цифрового пневмопривода.
На рис. 2.5 приведена схема многопоршневого цифрового пневмопривода.
Рис. 2.5. Схема многопоршневого цифрового пневмопривода
При подаче давления питания по i-му каналу i-ый поршень перемещается в крайнее правое положение, ограничиваемое упором, жестко соединенным с i–1 поршнем, а при снятии давления – в крайнее левое положение, ограничиваемое тем же упором. Результирующее перемещение складывается из перемещений всех поршней. Если ход каждого последующего поршня в два раза больше хода предыдущего, то результирующее перемещение X определяется формулой:
X=(1∙h1+2∙h2+4∙h3+8∙h4+….+2i-1∙hi+…+2n-1∙hn)H
где hi=1, если по i-му каналу подано давление; hi=0, если по i -му каналу давление не подано; H – величина хода первого поршня (величина дискреты).
Вектор h=(h1,h2,..hi,….hn) однозначно определяет положение выходного звена привода и в двоичном коде определяет величину результирующего перемещения. Очевидно, максимальное число возможных значений вектора h и, следовательно, точек позиционирования привода равно 2n.
| |
 |
Рис. 2.6. Схема цифрового пневмо-гидравлического привода с дозатором
В нем при подаче сжатого воздуха в i-ый канал жидкость вытесняется из соответствующего ему i-го дозатора в гидроцилиндр ГЦ. Величина перемещения выходного звена гидроцилиндра определяется суммарным объемом, поступившей в него жидкости. Объемы дозаторов регулируются с помощью винтов упоров. Если объем дозаторов с номерами 1,2,... i,. n сделать равными . 2i-1W, где W–объем первого дозатора, то перемещение X привода определяется формулой:
Х=(1∙h1+2∙h2+4∙h3+8∙h4+….+2i-1∙hi+…+2n-1∙hn)W/S
где hi =1, если i-й дозатор опорожнен; hi =0, если i-й дозатор не опорожнен; Sплощадь поршня гидроцилиндра.
Аналогично цифровому многопоршневому приводу вектор h=(h1,h2,..hi,…hn) однозначно определяет положение выходного звена привода и в двоичном коде определяет величину результирующего перемещения. Число точек позиционирования выходного звена привода равно 2n. Использование цифровых пневмоприводов упрощает стыковку привода с ЭВМ, т.к. исключает необходимость использования преобразователей «код–число импульсов», необходимых для шаговых пневмоприводов или «код–аналог», для следящих приводов.
| <== предыдущая страница | | | следующая страница ==> |
| Управляющие устройства | | | Системы непрерывного позиционирования |
Дата добавления: 2014-08-04; просмотров: 515; Нарушение авторских прав

Мы поможем в написании ваших работ!