Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Основные законы движения жидкости
Непрерывное позиционирование реализуют следящие пневмоприводы. Блок-схема такого привода представлена на рис. 2.7.
 |
Рис.2.7. Блок-схема следящего пневмопривода
 Регулятор (Р), сравнивая текущее положение выходного звена (ВЗ) привода X, измеряемое датчиком обратной связи (ДОС), с заданным значением, управляет двигателем (Д), осуществляющем перемещение выходного звена так, чтобы величина рассогласования ε текущего и задаваемого положения выходного звена обратилась в ноль.
Регулятор (Р), сравнивая текущее положение выходного звена (ВЗ) привода X, измеряемое датчиком обратной связи (ДОС), с заданным значением, управляет двигателем (Д), осуществляющем перемещение выходного звена так, чтобы величина рассогласования ε текущего и задаваемого положения выходного звена обратилась в ноль.
Среди следящих пневмоприводов можно выделить группы приводов с торможением выходного звена силами давления и приводов с дополнительными тормозными устройствами.
К первой группе относятся приводы, в которых для торможения при позиционировании выходного звена используются только силы, обусловленные давлением воздуха в полостях, а ко второй группе - приводы, в которых привлекаются некоторые дополнительные силы иной физической природы.
В качестве дополнительных тормозных устройств наиболее часто используют гидроцилиндры, фрикционные устройства торможения и самотормозящие механизмы.
На рис.2.8 представлена схема пневмопривода с тормозным гидроцилиндром.
 |
Рис.2.8 Схема пневмопривода с тормозным гидроцилиндром
В нем для преодоления всех сил сопротивления используется энергия сжатого воздуха, а торможение и фиксация выходного звена осуществляется с помощью гидроцилиндра. При подаче сжатого воздуха в одну из полостей пневмоцилиндра I поршень перемещает выходное звено привода и жестко связанный с ним поршень гидроцилиндра 2. Жидкость перетекает из одной полости гидроцилиндра в другую через открытый гидрораспределитель 3, При достижении выходным звеном привода заданной точки позиционирования устройство управления приводом подает команду закрытия гидрораспределителя 3, гидрораспределитель закрывается, переток жидкости из полости в полость гидроцилиндра прекращается, что в силу несжимаемости жидкости обеспечивает быструю остановку выходного звена привода и его фиксацию в заданном положении. Емкость 4 служит для компенсации разности объемов штоковой и поршневой полостей гидроцилиндра 2.
На рис. 2.8 представлена схема пневмопривода с встроенным фрикционным устройством торможения поршня.
 |
Рис. 2.8 Схема пневмопривода с встроенным
фрикционным устройством торможения поршня
В нем поршень пневмоцилиндра I содержит плунжеры 2 с фрикционными вкладышами 3, прижимаемыми к зеркалу цилиндра, При достижении поршнем заданного положения полости пневмоцилиндра соединяются с атмосферой, а в полости плунжеров подается сжатый воздух; сила прижатия вкладышей 3 возрастает. Это приводит к торможению и фиксации выходного звена привода, в заданном положении.
На рис. 2.9 представлена схема пневмопривода с самотормозящимся механизмом. В нем движение поршня и выходного звена привода под действием перепада давлений в полостях пневмо-цилиндра I возможно лишь в случае, когда электродвигатель 2 по сигналу устройства управления осуществляет вращение винта 3 в направлении, соответствующем перемещению поршня под действием сил давления.
 |
Рис. 2.9 Схема пневмопривода с самотормозящимся механизмом
При достижении выходным звеном заданной точки позиционирования электродвигатель выключается, вращение винта прекращается, что приводит к остановке и фиксации выходного звена привода.
Использование в пневмоприводах дополнительных тормозных устройств позволяет повысить их жесткость, и на этой основе расширить функциональные и технологические характеристики. Однако при этом существенно возрастает их сложность, стоимость, трудоемкость регулировки и обслуживания.
 Перспективным типом приводов роботов являются следящие пневмоприводы, в которых позиционирование выходного звена осуществляется за счет изменения сил, обусловленных давлением воздуха в полостях пневмодвигателей. На рис.2.10 представлена
Перспективным типом приводов роботов являются следящие пневмоприводы, в которых позиционирование выходного звена осуществляется за счет изменения сил, обусловленных давлением воздуха в полостях пневмодвигателей. На рис.2.10 представлена
Рис.2.10. Схема следящего пневмопривода с пропорциональным
управлением и распределительным устройством типа «сопло-заслонка»
В управляющее устройства привода УУ поступает сигнал Uвх, определяющий положение выходного звена привода и сигнал Uoc, определяющий его текущее положение. УУ посредством электромеханического преобразователя 2 отклоняет заслонку 3 на величину, зависящую от разности согналов Uвх и Uoc. Отклонение заслонки приводит к изменению проходных сечений каналов, полости пневмоцилиндра с атмосферой. В результате в полостях пневмоцилиндра создается разность давлений, обеспечивающая разгон либо торможение поршня и в конечном итоге его позиционирование в заданной точке, определяемой сигналом Uвх.
На. В нем устройство управления УУ переключает электро-пневмораспределитель в зависимости от знака разности входного сигнала Uвх и сигнала обратной связи Uос.
ε=sign(Uв х – Uос)
 |
Рис. 2.11 Схема следящего пневмопривода с релейным
управлением и клапанным распределительным устройством
Возникающий перепад давлений приводит к перемещению выходного звена в направлении, соответствующем уменьшению модуля разности сигналов. В силу инерционности элементов привода выходное звено проходит заданное положение. Это приводит к изменению знака разности Uвх-Uос. Клапан вновь переключается, поршень движется в обратном направлении. В результате возникаю1 автоколебания - выходное звено привода колеблется около заданного положения с некоторой амплитудой А и частотой ω. Пневмоприводы такого типа называют автоколебательными. Очевидно, чем меньше амплитуда автоколебаний А, тем выше точность позиционирования. Амплитуда и частота автоколебаний зависят от параметров привода и закона управления, реализуемого устройством управления. Амплитуда колебаний тем меньше, чем выше частота колебаний. Поэтому выбором параметров привода и закона управления стремятся увеличить частоту автоколебаний ω. Если, однако, достичь требуемых значений ω и A не удается, может использоваться внешний источник (генератор) колебаний достаточно высокой частоты. Его сигнал в устройстве управления суммируют с сигналом рассогласования Uвх-Uос и, пропуская через релейный элемент, получают широтно-импульсной модулированный сигнал, подаваемый на обмотку управления электроклапана. Пневмоприводы с таким типом управления относятся к приводам с широтно-импульсной модуляцией.
Широтно-импульсная модуляция часто используется также в приводах с пропорциональным управлением для сглаживания "разрывных" нелинейностей типа сухого трения, релейных статических характеристик распределительного устройства и др.
Наряду с рассмотренными устройствами управления в пневмоприводах могут реализовываться и другие законы управления. Их синтез осуществляется методами теории автоматического управления.
При этом существенным является объем информации о текущем состоянии привода, получаемый устройством управления от датчиков обратной связи.
В пневмоприводах реализуют обратные связи по положению и скорости выходного звена, перепаду давлений в полостях, току в обмотке электромагнита распределительного устройства.
В качестве датчиков обратной связи используют соответственно потенциометры, вращающиеся трансформаторы, индукционные датчики положения и скорости, тахогенераторы, датчики давления, токовые датчики.
Введение дополнительных обратных связей позволяет повысить точность функционирования, быстродействие привода, однако, вместе с этим приводит к усложнению конструкции, снижению надежности, росту стоимости, трудоемкости регулировки и эксплуатации привода. Поэтому, проектируя привод, стремятся обеспечить заданные показатели качества его функционирования, используя минимальное число обратных связей.
Следящие пневмоприводы могут использоваться как в работах с позиционной системой управления, так и в работах с контурной и адаптивной системами управления.
Основные законы движения жидкости
При математическом описании процессов движения жидкости в гидроприводе используют в основном два закона: закон сохранения массы и закон сохранения энергии. Эти законы, записанные применимо к движению жидкости являются основными законами гидродинамики.
Закон сохранения массы в гидродинамике выражается уравнением неразрывности
SV = const,
где S – площадь сечения, V– скорость потока в сечении .
Уравнение неразрывности выражает тот факт, что при установившемся движении количество жидкости, проходящей через любое сечение потока, остается неизменным (вещество нигде не может скапливаться или сплошность потока не нарушается).
Действительно, количество жидкости dm, проходящее через сечение площадью S за время dt определяется как

Следовательно, должно выполняться условие

или при  = const
= const
SV=const
 |
Закон сохранения энергии в гидродинамике отражает уравнение Бернулли.
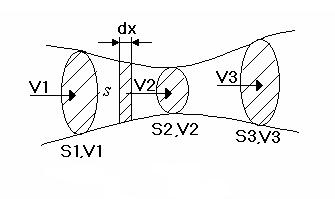
При допущении, что жидкость несжимаема, движение жидкости – установившееся, потери на трение пренебрежимо малы, потенциальная энергия жидкости в сечениях потока неизменна (сечения находятся на одинаковом уровне), уравнение Бернулли для двух сечений потока 1 и 2 может быть выражено уравнением
где p1, p2, v1, v2- давления и средние скорости жидкости в сечениях 1 и 2 соответственно.
Покажем его справедливость.
Рассмотрим участок потока жидкости, заключенный между сечениями 1 и 2. Площади сечений S  и S
и S  , скорости их движения v и v . За малый отрезок времени dt сечение 1 сместится на расстояние dx = v1dt, а сечение 2 на dx =v dt.
, скорости их движения v и v . За малый отрезок времени dt сечение 1 сместится на расстояние dx = v1dt, а сечение 2 на dx =v dt.
 |
При установившемся движении жидкости справедливо уравнение неразрывности потока
v S =v S ,
или
v S dt = v S dt  S dx = S dx ,
S dx = S dx ,
т.е.
 ,
,
где dW – элементарный объем жидкости, заключенный между сечениями 1-1* и 2-2*.
Масса элементарного объема жидкости
dm = ρdW
Изменение его кинетической энергии К при переходе от сечения 1 к сечению 2 определяется как
 К =
К = 
Движение жидкости и указанное изменение кинетической энергии ее элементарного объема обусловлено действием перепада давлений. Работа, совершаемая силами давления при рассматриваемом перемещении
А = p S dx – p S dx = (p – p )dW
Согласно закону сохранения энергии
К = А
откуда следует уравнение Бернулли
или
| <== предыдущая страница | | | следующая страница ==> |
| Системы непрерывного позиционирования | | | Секундный расход жидкости |
Дата добавления: 2014-08-04; просмотров: 692; Нарушение авторских прав

Мы поможем в написании ваших работ!