Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
Лекция 1. Классификация электроприводов
Политика управления дебиторской задолженностью представляет собой часть общей политики управления оборотным капиталом и маркетинговой политики организации, заключающиеся в оптимизации общего размера этой задолженности и обеспечении своевременной ее инкассации.
Управление ДЗ основано на 2-х подходах:
1.Сравнении доп. прибыли, связанной со схемой спонтанного финансирования, затратами и потерями, возникающими при изменении политики реализации продукции
2.Сравнении и оптимизации величины сроков ДЗ и КЗ по уровню кредитоспособности организации, времени отсрочки платежа, стратегии скидок, доходом и расходом по инкассации.
Спонтанноефинансирование – это коммерческое кредитование покупателя, основанное на дифференцированном и взаимовыгодном порядке оплаты договора поставки с применением льготного периода платежа по полученному товару и скидки с его цены за досрочную оплату.
Формирование политики управления дебиторской задолженностью организации осуществляется последующим основным этапам :
1. Анализ ДЗ организации в предшествующем периоде - основной задачей анализа явл-ся оценка уровня и состава ДЗ, а так же эффективности инвестируемых в них фин средств. При проведении анализа рассчитываются:
§ коэффициент отвлечения оборотных активов в ДЗ [ДЗ / общая сумма оборотных активов];
§ средний период инкассации ДЗ [средний остаток ДЗ / сумма однодневного оборота по реализации продукции в рассматриваемом периоде];
§ коэффициент оборачиваемости ДЗ [В / средний остаток ДЗ ];
§ оценивается состав ДЗ по отдельным ее возрастным группам, т.е. предусмотренным сроком ее инкассации ;
§ коэффициент просроченный ДЗ [сумма ДЗ неоплаченной в предусмотренный срок / общая сумма ДЗ];
§ определяется средний "возраст" просроченной ДЗ [средний остаток ДЗ, неоплаченный в срок / сумма однодневного оборота по реализации продукции]
Убытки предприятия, связанные с наличием просроченной ДЗ можно частично компенсировать за счет н/о базы и как следствие суммы налога на прибыль путем создание резерва по сомнительным долгам.
Сумма резерва по сомнительным долгам определяется по результатам проведенной в конце предыдущего отчетного периода инвентаризации ДЗ и исчисляется следующим образом:
1)По сомнительной задолженности со сроком возникновения свыше 90 дней - в сумму создаваемого резерва включается полная сумма, выявленной на основании инвентаризации задолженности.
2)По сомнительной задолженности со сроком возникновения от 45 до 90 дней включительно - в сумму резерва включается 50% от суммы, выявленной на основании инвентаризации, задолженности.
При этом сумма создаваемого резерва по сомнительным долгам не может превышать 10% от выручки отчетного периода.
Эффект от использования резерва по сомнительным долгам достигается путем отсрочки платежа по налогу на прибыль.
ПРИМЕР: На нач. года на предприятии создан резерв по сомнительным долгам на сумму 100 тыс. руб. За счет резерва списана сомнительная ДЗ в размере 50 тыс. руб. А остаток средств (ДЗ) отнесен на внереализационные доходы следующего года. Бизнес обеспечивает доходность 20%. Определить эффект от использования резервов по сомнительным долгам.
Н/о прибыль = 20% *( 100 -50 ) = 10 тыс.
10*0,2=2 тыс.
2. Формирование принципов кредитной политики по отношении к покупателям продукции - в процессе формирование принципов кредитной политики решаются 2 основных вопроса:
1.В каких формах осуществлять реализацию продукции в кредит. Формы реализации продук2ии в кредит имеют 2 разновидности:
§ Коммерческий;
§ потребительский кредит
2.Какой тип кредитной политики следует избрать:
§ консервативный;
§ умеренный;
§ агрессивный;
Задачи выбора кредитной политики решается предприятием исходя из целевых установок планов и предпочтений руководства и фин менеджеров
3. Определение возможной суммы оборотного капитала, направляемого в ДЗ - расчет необходимой суммы фин средств производится по формуле:
И_дз = О_рк * К_с/ц * (ППК_ср + ПР_ср) / 360
Идз - необходимая сумма фин средств, инвестируемых в дебиторскую задолженность
Орк - планируемый объем реализации продукции в кредит
Кс/ц - коэффициент соотношения себестоимости и цены продукции, выражен десятичной дробью, т.е. Показывает долю себестоимости в цене
ППКср - средний период предоставления кредита покупателям в днях
ПРср - средний период просрочки платежей по предоставленному кредиту в днях.
4. Формирование системы кредитных условий - в состав условий входят следующие элементы:
§ срок предоставления 4редита - характеризует предельный период на который покупателю предоставляется отсрочка платежа за реализованную продукцию;
§ размер предоставляемого кредита (лимит кредита) - характеризует максимальны предел суммы задолженности покупателя по предоставляемому товарному кредиту;
§ стоимость предоставления кредита - характеризуется системой ценовых скидок при осуществлении немедленных расчетов за приобретенную продукцию;
§ система штрафных санкций за просрочку исполнения обязательств покупателями
5. Формирование стандартов оценки покупателей и дифференциация условий предоставления кредита - в составе установления таки стандартов покупателей лежит их кредитоспособность.
Формирование системы стандартов оценки покупателей включает следующие элементы:
§ определение системы характеристик оценивающих кредитоспособность отдельных групп покупателей;
§ формирование и экспертиза информационной базы, проведение оценки кредитоспособности покупателей, обеспечение ее достоверности;
§ выбор методов оценки отдельных характеристик кредитоспособности покупателей
§ группировка покупателей продукции по уровню кредитоспособности;
§ дифференциация кредитных условий в соответствии с уровнем кредитоспособности покупателя
6.Формирование процедуры инкассации ДЗ - в составе этой группы мер должны быть предусмотрены сроки и формы предварительного и последующего напоминания покупателям о дате платежей, возможности и условий пролонгирования долга, условий возбуждения дела о банкротстве несостоятельных дебиторов
7.Обеспечение использования в организации современных форм рефинансирования ДЗ, т.е. ускоренный перевод ее в другой формы оборотных активов организации: д/с и высоколиквидные краткосрочные ц/б
К современным формам рефинансирования современной ДЗ относится : факторинг и форфейтинг. В основе факторинга лежит переуступка права требования счета-фактуры, а при форфейтинге - векселя(соло, тратта)
8.Построение эффективных систем контроля за движением и современной инкассации ДЗ. Контроль организуется в рамках построения общей системы фин контроля в организации как самостоятельный его блок.
Лекция 1. Классификация электроприводов.
Электроприводы, используемые в различных технологических установках, разнообразны по своим функциональным возможностям, схемному и конструктивному исполнению, степени автоматизации, что связано с большим разнообразием рабочих машин.
Электроприводы классифицируются по отдельным признакам:
| Классификационные признаки электроприводов |
| Число рабочих Органов проводимых ЭП | Виду движения ЭД | Способу соединения двигателя с рабочим органом | регулируемости | Основному контролируемому параметру | Виду управления |
| индивидуальный | Вращательное | редукторный | Не регулируемый | Регулируемый по моменту | С ручным управлением |
| групповой | Линейное | безредукторный | регулируемый | Регулируемый по скорости | С полуавтоматическим |
| Многокоординатного движения | Конструктивно-интегрированный | Регулируемый по положению | Замкнутой системой автоматического регулирования скорости (САР). С ручным заданием или от системы управления технологическим процессом | ||
| С замкнутой САР положения (позиционирования) | |||||
| С Программным управлением | |||||
| Следящий |
Классификация по числу рабочих органов, приводимых движением электроприводом. Электроприводы бывают индивидуальными и групповыми. Если каждый рабочий орган машины приводится в действие своим электроприводом, то он называется индивидуальным – такой привод может быть одно или многодвигательным.
При групповом электроприводе один двигатель приводит в движение несколько рабочих органов. При этом усложняется кинематическая цепь рабочей машины и затрудняется управление рабочими органами, как для рационального управление рабочими органами необходимо применять специальные механические устройства – управление муфты, коробки передач, фрикционная.
По мере развития техники групповой электропривод всё больше вытесняется индивидуальными.
Классификация по виду движения электродвигателя. Наибольшее применение получили электроприводы вращательного движения. Сейчас значительное внимание уделяется линейным двигателям. В тех механизмах, где рабочий орган совершает поступательное или возвратно-поступательное движение, применение линейных двигателей конструктивно гораздо удобнее, чем использование специальных кинематических пар: винт-гайка, кривошипно-шатунный механизм. Из-за низких энергетических и массогабаритных показателей линейные электродвигатели не находили применения. Создание новых конструкций линейных двигателей с питанием от полупроводниковых преобразователей частоты достигли новых возможностей применения для металлорежущих станков.
Многокоординатные электроприводы на основе специальных шаговых электродвигателей являются отечественной разработкой и находят применение в высокоточных робототехнических установках, сборочных автоматах. Многокоординатные электроприводы позволяют осуществлять пространственные движения рабочего органа по нескольким координатам.
Классификация по способу соединения двигателя к рабочим органам. Электродвигатели соединяются с рабочим органом машины либо непосредственно, либо редуктором или другую кинематическую передачу.
Непосредственное соединение двигателя с рабочим органом характерно для высокоскоростных рабочих машин, например, насосов и вентиляторов. У тех машин, где скорость рабочего органа меньше номинальной скорости электродвигателя, применяют редукторы, которые снимают скорость и увеличивают момент на валу рабочего органа.
Для высокоточных механизмов и машин, работающих динамичных в динамичных режимах, стремятся исключать механические передачи между валом двигателя и рабочим органом.
Также электроприводы называют безредукторными. При этом возрастают, габаритны размеры и масса приводного двигателя, поскольку эти параметры при одной и той же мощности двигателя примерно обратно пропорциональны номинальной скорости двигателя. Для точных электропривода конструктивно объединяют в последние годы рабочим органом с приводным электродвигателем (электрошпиндель для шлифовальных станков, мотор-колеса для транспортных средств). Новые направления - мехатронные модули – электромеханических модулей, включающих в себя рабочий орган, электротехническое устройство (двигатель) с системой его регулирования микропроцессорная управляющее устройство (роботы и станки с ЧПУ)
Классификация по регулируемости. Под регулируемостью понимается возможность изменения или точного поддержания скорости ускорения или момента (усилия) приводного электродвигателя.
Исторически сложилось, что большинство существующих электроприводов выполнено на базе К3 асинхронных электродвигателей, недопускающих в стандартной схеме их питания регулирования скорости или момента. Модификацией односкоростных асинхронных электродвигателей является двух и трех скоростные двигатели. Электроприводы с многоскоростными двигателями дают возможность получать 2 или 3 одинаковые рабочие скорости, но не могут обеспечить плавного регулирования скорости в заданном диапазоне. К подобным по управляемости можно отнести электроприводы с реостатно-контакторным управлением.
Регулируемый электропривод выполняет следующие функции:
· Установка требуемой скорости в заданном диапазоне.
· Стабилизация установленного значения скорости с заданной точностью при возмущающих воздействиях (изменения нагрузки на валу).
· Регулирование момента, развиваемого двигателем в двигательном и тормозном режимах и ускорения (замедление) привода.
· Формирование требуемого характера изменения скорости во времени  с заданной точностью.
с заданной точностью.
Современная тенденция использовать регулируемый электропривод.
Классификация по основному контролируемому параметру
В зависимости от технических требований электропривод должен осуществлять регулирование по одной из главных контролируемых величин: моменту, скорости или положению рабочего органа машины. Это не означает, что при этом не регулируются другие величины; при регулировании положения необходимо регулировать скорость и т.д.
Регулирование момента как основной регулируемой величины характерным для тех производственных машин, где контролируется напряжение обрабатываемого материала: намоточных устройств, линий обработка ткани... наиболее часто основной контролируемой величиной является скорость.
Для механизмов главного движения станков, клетей прокатных станов, конвекторов, питателей, насосов и множество других машин в соответствии с технологическим процессом требуется регулирование скорости. Есть механизмы, для которых необходимо позиционирование рабочего органа или перемещение его по заданной траектории. Такие электроприводы управляются по положению. В зависимости от диапазона регулирования скорости различают следующие регулируемые электроприводы:
· с ограниченным диапазоном регулирования (не более 2:1)
· общего назначения с диапазоном регулирования (не выше 100:1)
· широко регулируемые (диапазон регулируемой скорости 1000:1)
· высокоточные электроприводы (диапазон регулирования 10000:1 и выше)
Классификация электроприводов по виду управления.
Электроприводы с системами управления различаются по их функциональным возможностям и сложности.
Наиболее простые системы с ручным управлением характерных для нерегулируемых электроприводов. Такие электроприводы имеют систему управления на основе релейно-контакторной аппаратуры, выполняющей функции пуска, останова, защиты и блокировки.
В электроприводах с полуавтоматическим управлением предполагается управление электроприводом оператором с помощью командоконтроллера, кнопок управления и других аппаратов. Система управления содержит элементы автоматического управления и регулирования, обеспечивающие автоматическое изменение параметров электропривода (переключение ступеней сопротивления пускового реостата в функции тока или времени) в соответствии с командами оператора (электропривод грузоподъемных кранов).
Для регулируемого электропривода используются замкнутые САР по току и скорости. В этом случае управление может осуществляться операторами (машинистами экскаваторов, прокатных станов) Задание на скорость может осуществляться системой технологической автоматики (бумагоделательные машины, дозаторы) Одной из разновидностей являются позиционные электроприводы, которые обеспечивают точные останов рабочего органа механизма в заданном положении. Системы управления такими приводами содержат замкнутый контур положения, действующий постоянно или при в ходе рабочего органа в зону точного останова.
Если задающее воздействие на параметры движения рабочего органа формируется программными средствами, то такие электроприводы называют электроприводами с числовым программным управлением (ЧПУ), приводы с ЧПУ содержат замкнутые контуры регулирования по скорости и положению.
Если положение рабочего органа должно изменяться в соответствии с заданием, характер которого заранее неизвестен, то функцией электропривода в этом случае является слежение и отработка этого задания с необходимой точностью. Такой электропривод называют следящим.
Электропривод является электротехнической системой, служащей для преобразования электрической энергии в механическую, которая необходима для осуществления различных технологических процессов в различных сферах деятельности человека.
Однако функция электропривода не ограничиваются только преобразованием энергии. Вторую функцию электропривода можно определить как управление движением исполнительных органов рабочей машины, причем оно может осуществляться в ручную с элементами автоматики или автоматически.
Сочетание двух функций электропривода – преобразование электроэнергии в механическую и управление переменными величинами, характеризующими механическую энергию (мощность, усилие, крутящий момент, скорость, ускорение, путь и угол перемещения) в целях рационального выполнения технологического процесса выполняемого рабочей машиной – определяет назначение и роль электропривода в машинном производстве.
Электросхема электропривода вентилятора
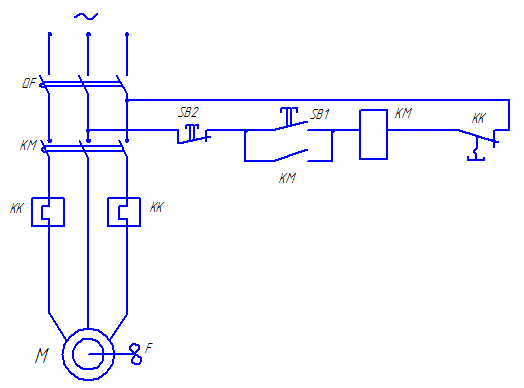
Назначение электропривода приводить в движение рабочие машины и управлять этим движением.
2. Электромеханические свойства электродвигателей
2.1 Механические и электромеханические характеристики электродвигателей.
Момент двигателя зависит от скорости. Взаимосвязь момента, развиваемого двигателем, и скорости M=j(w) определяет механические характеристики электродвигателя. Механические характеристики изображаются в поле координат «М-w». 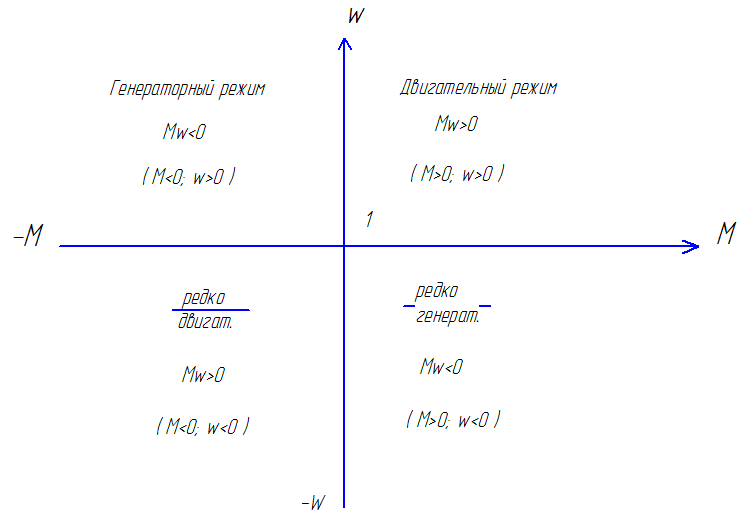
Обычно пользуются представлением механических характеристик в квадратах I и II.
Основным параметром, определяющим вид механической характеристики является жесткость ее, определяемая по формуле:
b=  ≈
≈ 
где  - приращение момента,
- приращение момента,
 - приращение скорости.
- приращение скорости.
Если механическая характеристика прямолинейна (1), то ее жесткость – величина постоянная, равная тангенсу угла наклона характеристики к оси ординат:
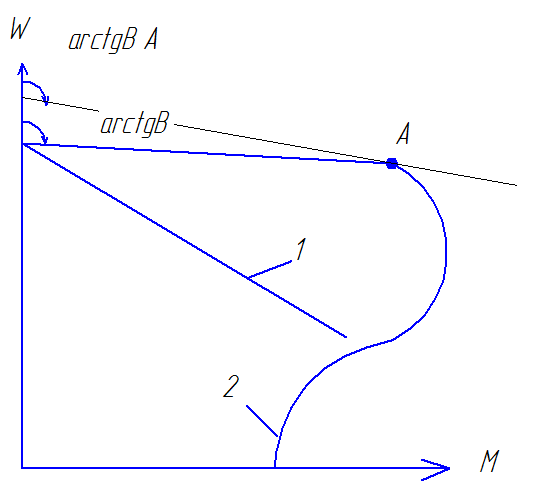
1-механическая характеристика прямолинейна
2- криволинейная механическая характеристика
Если характеристика криволинейная (2), то жесткость определяется тангенсом угла наклона касательной к технической характеристике в данной точке (например, А).
Жесткость характеризует способность двигателя воспринимать приложение нагрузки (момента) на его валу.
Поскольку обычно с увеличением момента нагрузки скорость уменьшается, то жесткость является величиной отрицательной.
Если при положении нагрузки скорость уменьшается незначительно, то механическая характеристика считается жесткой.
Если при том же значении прикладываемой нагрузки скорость изменяется значительно, то такую характеристику называют мягкой.
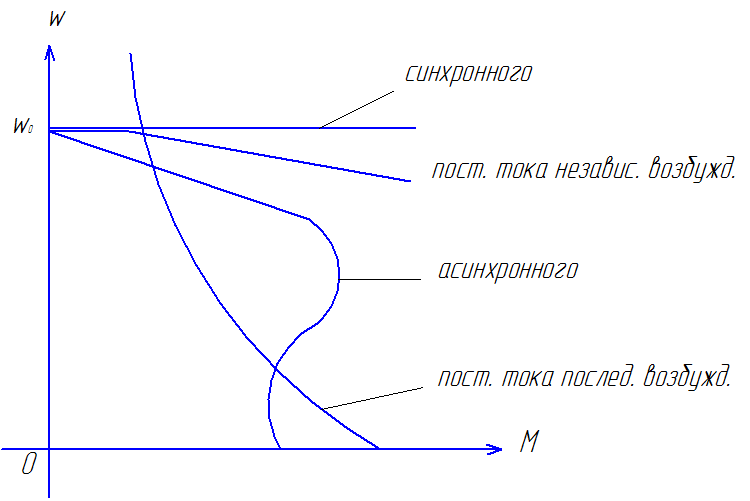
Естественные механические характеристики двигателей
Искусственные (или регулировочные) механические характеристики получаются, когда в целях регулирования изменяются параметры питающего напряжения или в цепи обмоток вводятся дополнительные элементы (активное или индуктивные сопротивления, полупроводниковые приборы.
Пользуясь выражением для момента асинхронного двигателя
 (1)
(1)
Где U1 –напряжение статора
S – относительное скольжение
S =  где w0 -скорость поля статора
где w0 -скорость поля статора
 - скорость поля ротора
- скорость поля ротора
r2¢=r2*kT2 – приведенное сопротивление цепи ротора к обмотке статора с учетом коэффициента трансформации
kT = U1 /E2H
где E2H –номинальная фазная ЭДС ротора
E2H =V1/KT
Xk – индуктивное сопротивление короткого замыкания
Xk = X1+X¢2H
X¢2H индуктивное сопротивление обмотки ротора при S=1, а X¢2H =X2*K2T индуктивное сопротивление обмотки ротора приводимое к обмотке статора
X2s=1 = X2H
r1 – активное сопротивление обмотки статора
Строим механическую характеристику асинхронного двигателя S=f(M)
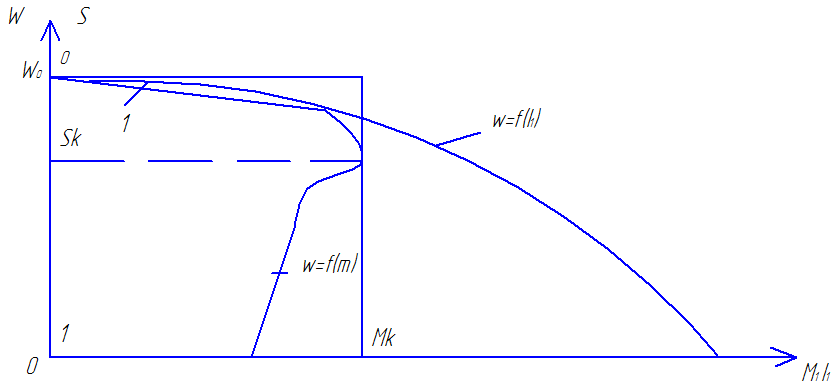
Механическая (1) и электромеханическая (2) характеристики асинхронного двигателя с фазным ротором, замкнутым накоротко.
Электромеханическая характеристика w=f(I1 ) определяется из векторной диаграммы асинхронного двигателя (упрощенный)
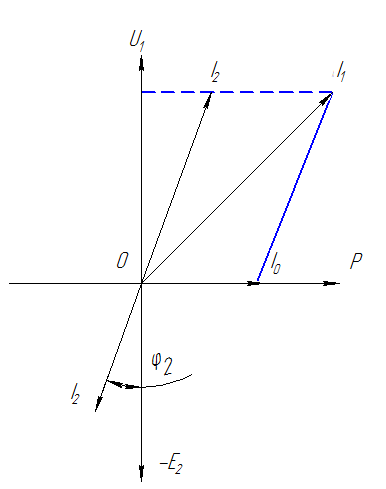
Пологая ток намагничивания реактивным, получим
 =
= 
Где  =
= 
Полагая dm/ds = 0 найдем максимальный крутящий момент асинхронного двигателя
Mk=  (2)
(2)
И соответствующее ему критическое скольжение Sk
(3) Sk =± r2 /  +к двигательному режиму: - к генераторному режиму
+к двигательному режиму: - к генераторному режиму
Отношение максимального момента к номинальному называется перегрузочной способностью асинхронного двигателя λ=Мк/Мн (4)
С учетом (2) и (4) формула (1) может быть преобразована к более удобному для пользования выражению – формуле Клосса M=2Mk(1+aSk)/(Sk/S+S/Sk+2aSk) (5)
где a=r1/r¢2
| <== предыдущая страница | | | следующая страница ==> |
| УПРАВЛЕНИЕ ДЕБИТОРСКОЙ ЗАДОЛЖНОСТЬЮ | | | Пуск асинхронного двигателя с фазным ротором |
Дата добавления: 2014-05-03; просмотров: 687; Нарушение авторских прав

Мы поможем в написании ваших работ!