Главная страница Случайная лекция

Мы поможем в написании ваших работ!
Порталы:
БиологияВойнаГеографияИнформатикаИскусствоИсторияКультураЛингвистикаМатематикаМедицинаОхрана трудаПолитикаПравоПсихологияРелигияТехникаФизикаФилософияЭкономика

Мы поможем в написании ваших работ!
ИСПОЛЬЗОВАНИЕ В ПОЛЕТЕ
Перед выруливанием на ВПП при необходимости включить РЛС.
Для работы в режиме ЗЕМЛЯ:
- установить ПРР на индикаторе штурмана в положение ЗЕМЛЯ;
- установить ручкой УГОЛ НАКЛОНА такой наклон антенны, при котором радиолокационное изображение земной поверхности просматривается на большей части экрана индикатора;
- установить ручкой МАСШТАБ наиболее оптимальный масштаб, а ручками ЯРКОСТЬ и КОНТРАСТ добиться наиболее четкого изображения интересующего ориентира.
Типичное радиолокационное изображение земной поверхности (фото 8, 9).
Фото 8.
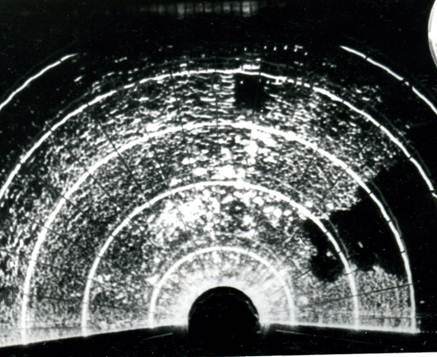
Фото 9.
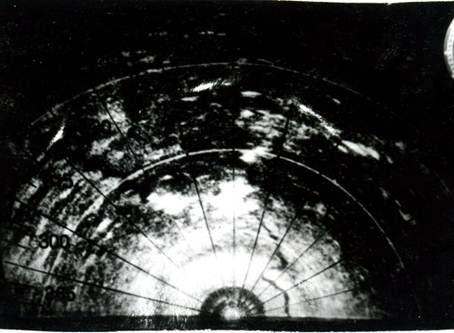
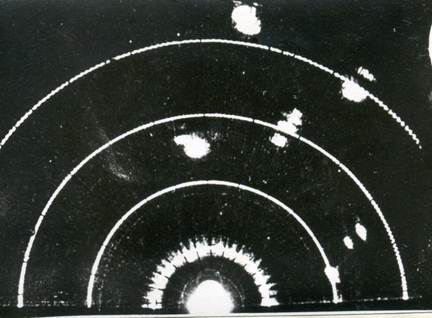
Фото 10. РЛ изображение земной поверхности при оптимально установленном для наблюдения водных ориентиров регуляторе «Контраст»

Для работы в режиме МЕТЕО:
- установить ручку УГОЛ НАКЛОНА в нулевое положение;
- произвести по мере приближения к зоне грозовой деятельности ручкой МАСШТАБ изменение масштаба изображения на экране индикатора.
Фото 11.
После обнаружения зоны активной грозовой деятельности или турбулентной облачности для определения степени их опасности для полета:
- установить ПРР в положение КОНТУР;
- отрегулировать ручками ЯРКОСТЬ и КОНТРАСТ необходимое качество изображения;
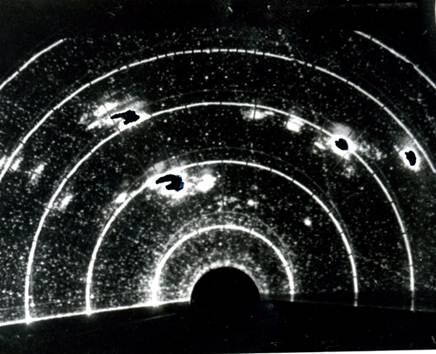
- определить по характеру изображения наиболее опасные зоны для полета. Чем уже засвеченные участки между темными пятнами зон наибольшей турбулентности, тем опаснее эти зоны для полета. Полета через эти участки облачности следует избегать (фото 12);
Фото 12.
- определить высоту верхней кромки грозового фронта, для чего, поворачивая ручку УГОЛ НАКЛОНА медленно вверх до исчезновения изображения грозового фронта с экрана индикатора, отсчитать угол подъема антенны. По расстоянию до грозового фронта и углу подъема антенны определить высоту развития грозового фронта относительно высоты полета самолета; принять меры для обеспечения безопасности полета в зависимости от характера изображения и высоты развития грозового фронта.
Для работы в режиме СНОС:
РЛС в режиме «Снос» обеспечивает измерение угла сноса самолета методом «остановленной антенны», не требуя для этого наличия каких-либо наземных РЛ ориентиров. Перевод радиолокатора в указанный режим должен производиться обязательно из режима «Земля» после получения в нем РЛ изображения земной поверхности на экране. Порядок работы с радиолокатором при измерении угла сноса должен быть следующий:
- установить переключатель режима работы в положение «Снос»;
- установить переключатель длительности развертки в положение «50»;
Через несколько секунд после включения режима автоматическое перемещение линии развертки на индикаторе должно прекратиться и она должна остановиться на экране в каком-то произвольном положении (при кренах возможно последующее произвольное перемещение линии развертки в иное положение);
- нажатием соответствующей клавиши индикатора штурмана, добиться перемещения линии развертки в тот азимутальный сектор экрана, где предполагается нахождение истинной линии пути самолета. При этом скорость перемещения линии развертки может регулироваться с помощью регулятора «Сканирование». Этим регулятором можно в ряде случаев уменьшить скорость линии развертки до нуля, поэтому, если после нажатия клавиши линии не перемещается, необходимо повернуть этот регулятор до начала движения.
- уменьшить при подходе к предполагаемому положению истинной линии пути (риски 30° либо 330°) с помощью регулятора «Сканирование» скорость перемещения линии развертки до минимальной. Прекратить после этого перемещение, отпустив клавишу;
- кратковременным нажатием толчками клавиши, перемещать линию развертки сначала в одну, а затем в другую сторону от предполагаемого положения линии пути, непрерывно наблюдая за изменениями характера приближения линии развертки к действительному положению истинной линии пути самолета. Линия развертки или отдельные ее участки начнут мерцать сначала с очень высокой, а затем все более и более низкой частотой. Самая низкая частота мерцаний будет наблюдаться при совпадении линии развертки с действительным положением истинной линии пути самолета.
Величина и знак угла сноса определяются по азимутальной шкале индикатора после того, как линия развертки остановлена в положении, характеризующимся наименьшей частотой мерцаний.
При измерении угла сноса не устанавливать чрезмерной яркости изображения, при которой начинается сплошной выравнивающий засвет всей линии развертки, так как это может сделать измерение невозможным.
Для работы в режиме РЛО:
- установить ПРР в положение ЗЕМЛЯ, а ПРРна блоке управления в положение РЛО;
- установить необходимый масштаб развертки;
- установить ручку КУО на блоке управления в нулевое положение;
- добиться ручками ЯРКОСТЬ, КОНТРАСТ и НАКЛОН оптимального радиолокационного изображения на экране индикатора.
На расстоянии 7 - 25км от площадки сброса груза выбрать характерный радиолокационный ориентир. Выполнить маневр самолета так, чтобы площадка сброса и радиолокационный ориентир находились на линии пути самолета. Определить знак и величину угла сноса самолета на этом курсе и ввести поправку линии КУО на величину угла сноса самолета.
При подлёте самолета к радиолокационному ориентиру на расстояние 35 - 40км переключатель МАСШТАБ развертки установить в положение " 50км". При этом на экране появится электронное перекрестие. В зависимости от расположения радиолокационного ориентира от площадки сброса и высоты полета самолета необходимо выполнить расчет величины наклонной дальности до точки сброса.
ПРЕДУПРЕЖДЕНИЕ!
В радиолокаторе ТОЛЬКО В РЕЖИМЕ РЛО показания счетчика механизма "ДАЛЬНОСТЬ" увеличены на два километра.
При сбросе груза по методике работы по вынесенному ориентиру, когда дальность от площадки сброса до радиолокационного ориентира определяется по карте, необходимо на механизме "ДАЛЬНОСТЬ" выставить расчетную величину наклонной дальности, уменьшенную на два километра.
При сбросе груза по методике работы по пролету, когда дальность до радиолокационного ориентира определяется радиолокатором с помощью метки наклонной дальности, для определения истинной дальности необходимо к полученному результату счетчика дальности прибавить два километра.
В момент совпадения характерного радиолокационного ориентира с задним фронтом метки дальности произвести сброс груза или включить секундомер для отсчета времени до момента сброса.
Для работы в режиме МАЯК:
- установить ПРР на блоке управления в положение МАЯК;
- установить масштаб, соответствующий предполагаемой дальности до маяка-ответчика;
- установить переключатель кодовна щитке дистанционного управления (ЩДУ) аппаратурой РПМ-СМ (фото 157) в положение, соответствующее заданию на полет;
- отметка от маяка в зависимости от высоты полета самолета должна быть обнаружена на дальности 50 – 250км.
- установить поворотом ручки КУО метку КУО на угол, величина которого равна углу сноса самолета;
- развернуть самолет так, чтобы отметка маяка перемещалась вдоль линии КУО;
- при приближении к маяку ручкой «МАСШТАБ 15 – 50км.» установить масштаб развертки, наиболее удобный для наблюдения. При необходимости, с помощью метки дальности, совмещая ее с отметкой радиомаяка поворотом ручки ДАЛЬНОСТЬ, определить дальность до радиомаяка по показаниям счетчика дальности. При кодированном запросе определение дальности производить по ближней отметке из всей комбинации. По мере приближения к радиомаяку его отметка на экране индикатора превращается в дугу. Для устранения дуги переключатель кодов установить в положение БЛИЖН. КОД на ЩДУ РПМ-СМ. Отметка радиомаяка становится точечной.
По мере приближения самолета к маяку ручкой «ЗАДЕРЖКА ПЛАВНАЯ» произвести раскрытие центра развертки так, чтобы метка дальности находилась примерно в средней части экрана индикатора. Регулятор наклона антенны установить в положение минус 9 - 12°.
При совпадении переднего фронта отметки от маяка с задним фронтом метки дальности, произвести сброс груза, либо включить секундомер для отсчета времени до момента сброса.
Для повышения точности прицеливания целесообразно произвести калибровку метки дальности перекрестия Дн. Для этого переключатель режимов установить в положение «КАЛИБР.», (только на пульте ГР-10Д) при этом на экране индикатора появятся 2-х км. электронные метки. Установив ручкой "Дальность" по цифровому счетчику дальность 2км, с помощью потенциометра Дн мин. (расположенного в нише лицевой панели блока ГР-10Д) совместить на экране индикатора первую 2-х км. калибрационную метку с меткой дальности Дн, после чего установить по цифровому счетчику дальность 18км и с помощью потенциометра Дн мах. совместить девятую 2-х км. метку с меткой дальности Дн. Возвратить цифровой счетчик в положение 2км, убедиться в совпадении метки дальности Дн и первой 2км. калибрационной метки. Если совпадение нарушено, обеспечить его с помощью потенциометра Дн мин., после чего провести проверку совпадения на дальности 18км. Проведя в указанном порядке несколько проверок и подстроек добиться совмещения метки дальности с соответствующими калибрационными метками в точках 2км и 18км.
Установить ручкой "дальность" по цифровому счетчику поочередно 6 и 16км и убедиться, что метка дальности совпадает соответственно с 3 и 8 метками. Точность совпадения должна быть не хуже на 6км ±150м, на 16км ± 200м.
После окончания калибровки переключатель режимов установить в положение "Маяк".
Примечание. Совмещение метки дальности с соответствующей калибрационной 2-км. меткой дальности производится так, чтобы метка дальности находилась под 2км. меткой с чуть заметным просветом.
| <== предыдущая страница | | | следующая страница ==> |
| ПРОВЕРКА РАБОТОСПОСОБНОСТИ | | | Система посадки ILS |
Дата добавления: 2014-02-26; просмотров: 522; Нарушение авторских прав

Мы поможем в написании ваших работ!